
Это мой первый обзор товаров фирмы Flycolor — стек X-Tower. Меня впечатлили характеристики и цена их регуляторов скорости BLHeli_S Rapter, так что надеюсь протестировать и другие девайсы от Flycolor.
Оригинал: Review: Flycolor X-Tower Stack | FC & 4in1 ESC
Где купить?
Купить на Banggood | AliExpress
Что хорошего в X-Tower Stack?
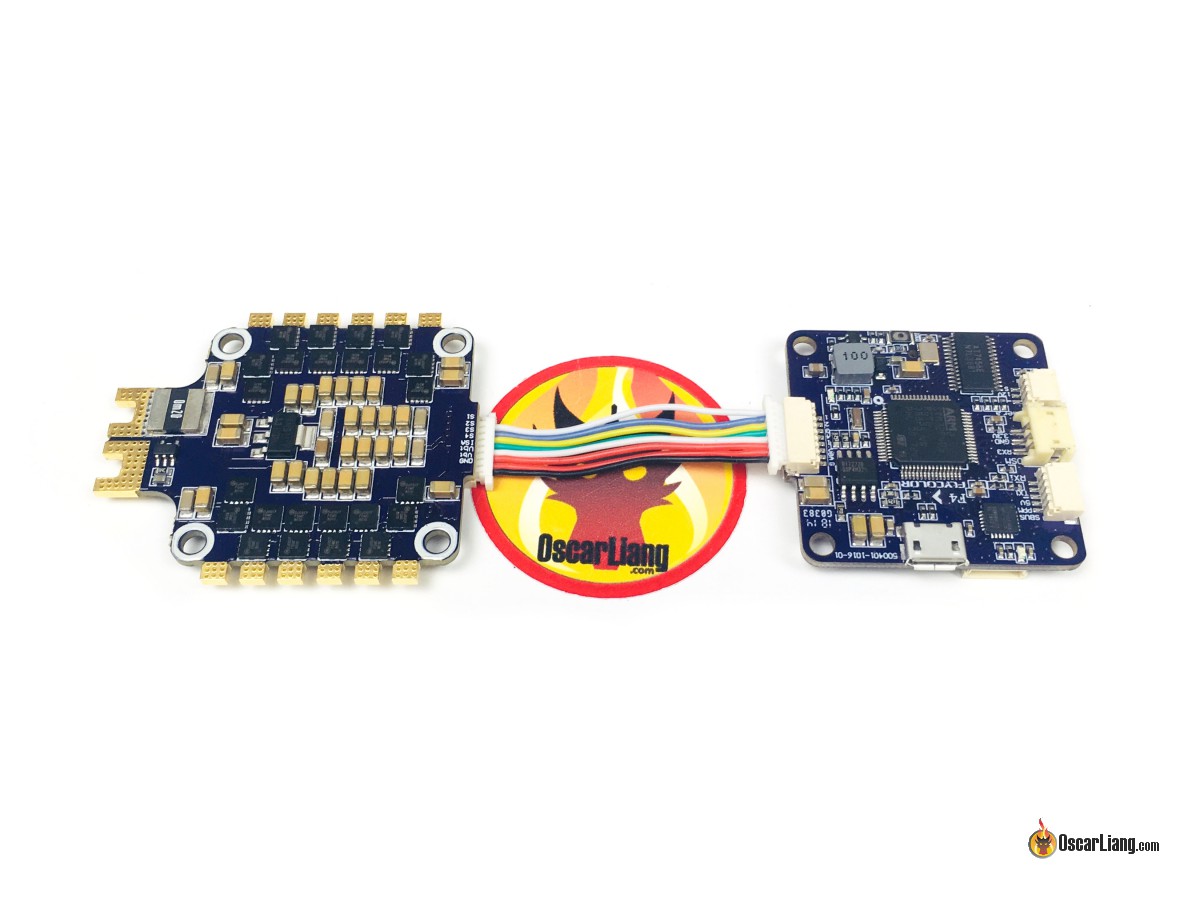
X-Tower — это стек из двух плат, полетный контроллер на F4 и регуляторы скорости 4-в-1 под управлением BLHeli_32.
В комплекте, пожалуй, наибольшее число аксессуаров из всех ПК и стеков, которые я видел. Не хватает только пищалки 🙂

- XT60 с проводом
- конденсатор 25В 330 мкФ (англ.)
- 4 резиновые стойки для антивибрационного монтажа ПК
- 4 нейлоновых винта и гайки M3
- 4 резиновых шайбы
- куча кабелей
Цена $78, что на $10 дешевле, чем Kakute F4 с регуляторами Tekko32 4-в-1 (англ).

Характеристики полетного контроллера
- Процессор F405, гироскопы MPU6000
- BEC: 3,3 В (для приемников Spektrum), 5 В, 12 В
- 6 последовательных портов
- Betaflight OSD
- MicroSD для Blackbox (до 32 ГБ)
На этом ПК нет пятаков или отверстий для пайки, везде используются разъемы типа JST. Вообще он предназначен для работы в паре с регуляторами 4-в-1.

JST-разъемы есть с обеих сторон платы. Слот для флешки на нижней стороне.

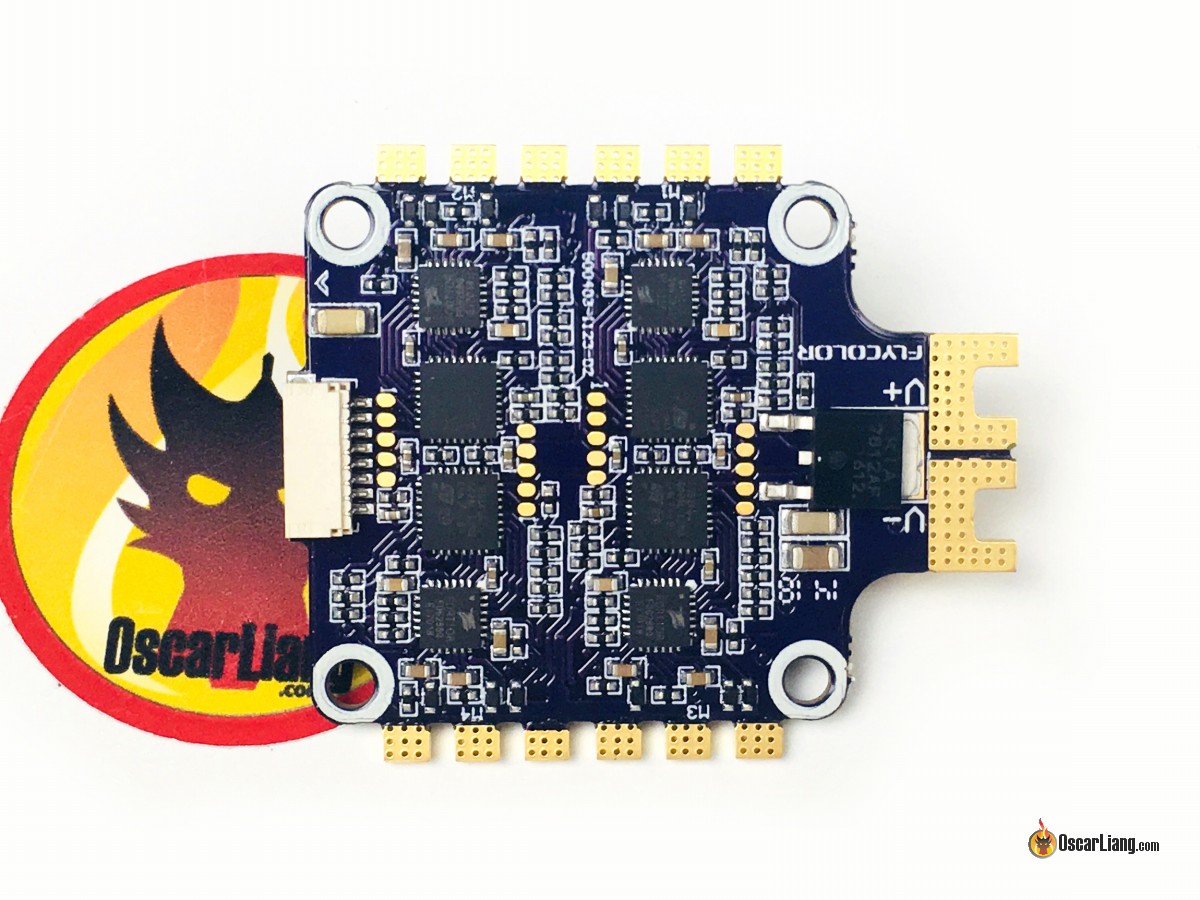
Характеристики регуляторов скорости 4-в-1
- Прошивка BLHeli_32
- Макс. ток: 40А (кратковременно до 45А)
- Напряжение питания: 3S — 6S
- Встроенный датчик тока (один шунтирующий резистор)
К сожалению эта плата не поддерживает телеметрию с регуляторов.

Качество сборки очень хорошее, для фильтрации шумов на плате установлено довольно много конденсаторов (чего и следует ожидать от хороших современных регулей).
Мысли
Я собираюсь протестировать X-Tower stack на своем коптере Martian Mini (англ).
Честно говоря, в этом стеке нет ничего экстраординарного, ПК на F4 и регули с BLHeli_32 — это нормальные, современные комплектующие. Однако, этот набор дешевле своих аналогов. Если он работает не хуже, что мы и проверим в тестах, тогда стоит его рассмотреть при покупке.

JST-разъемы
Лично я не фанат пластиковых JST-разъемов. Из-за того, что я меняю ПК и регули на уже собранном коптере, мне придется припаять кучу проводов и разъемов, чтобы подключить их к ПК. Довольно много дополнительной работы, особенно, если к старому железу все присоединялось пайкой.
В использовании разъемов вместо пайки есть и преимущества. Ничего не придется паять при замене ПК на такой же. Вероятно, это очень удобно гонщикам, тем, кто чаще других ломает контроллеры, это решение позволяем им перебирать коптер значительно быстрее.

Пайка и подключение
Помимо разъемов есть еще пара небольших моментов, на которые я бы хотел обратить внимание.
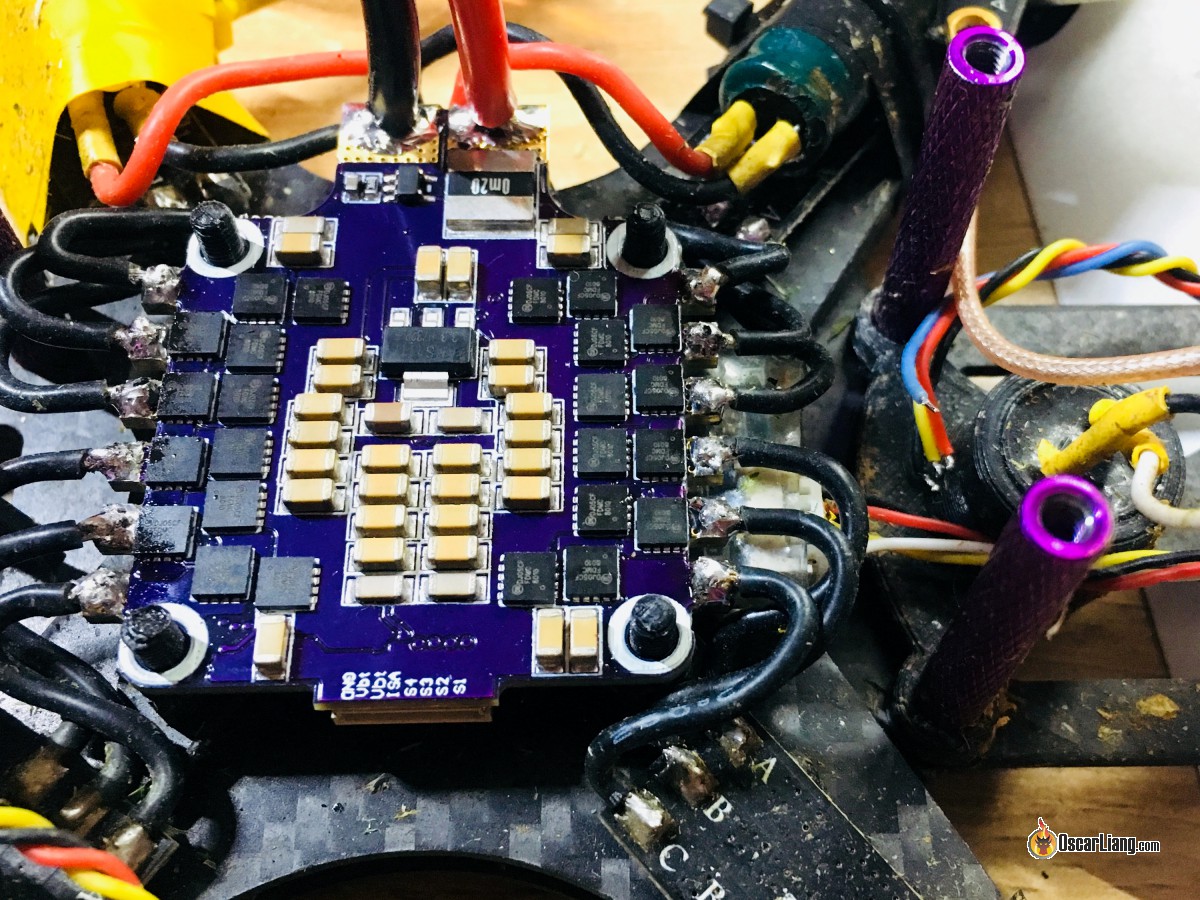
Точки пайки проводов к регуляторам расположены довольно близко к силовым транзисторам, поэтому пайка становится немного сложнее, приходится делать все значительно аккуратнее, чтобы припоем или паяльником не повредить элементы на плате.
Надписи на плате довольно сложно прочесть, к счастью, инструкция написана очень хорошо.
Если вы решите повернуть ПК или регуляторы на 90/180 градусов, то кабель для подключения будет коротковат.
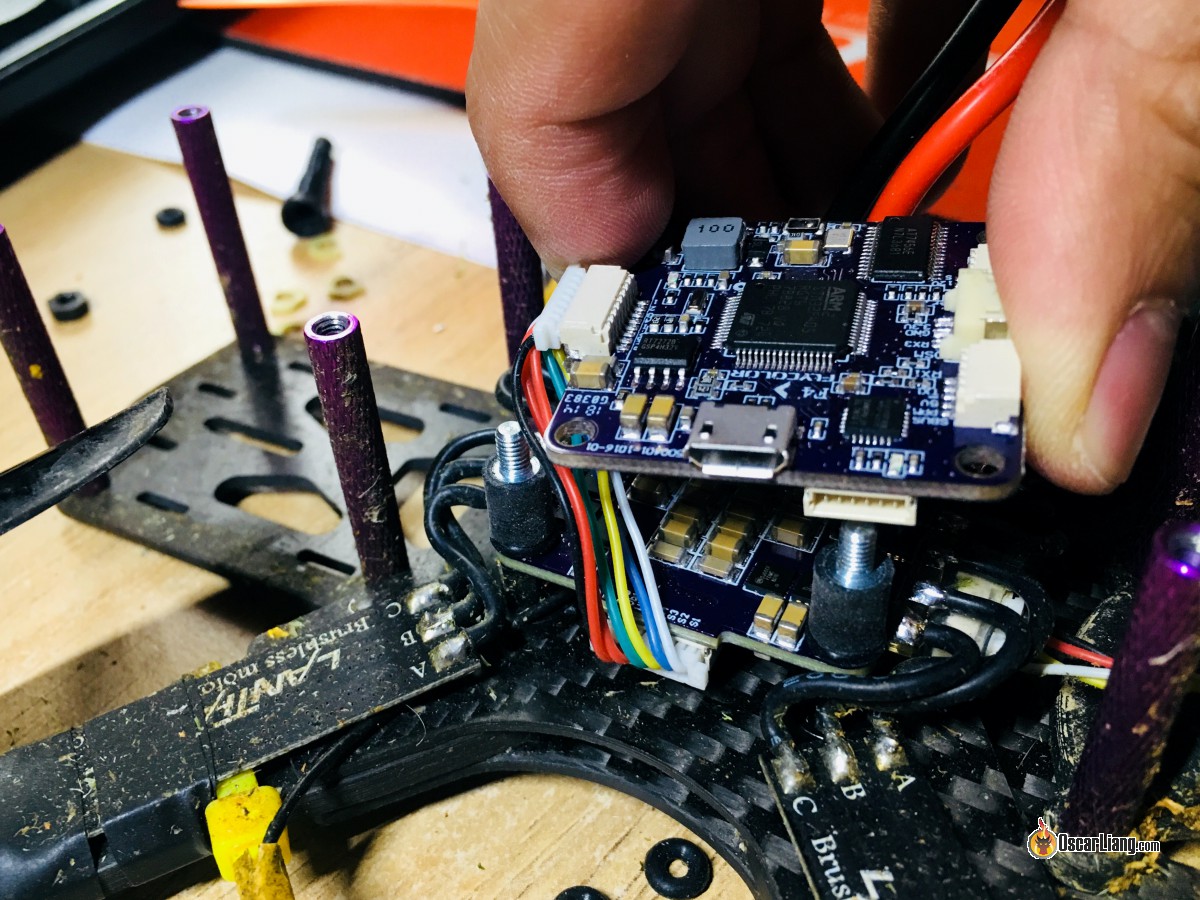
Flycolor выдает 12 вольт для питания камеры и видеопередатчика. Если камера или видеопередатчик требуют 5 вольт, тогда придется припаивать провод к другому разъему… Порядка в проводах это не добавляет. Вот одна из причин, по которым я предпочитаю пайку, а не разъемы.
Питание гироскопов (3,3 В) выведено наружу и используется внешними устройствами, например, приемником Spektrum. Возможно это не страшно, но я бы предпочел отдельную линию питания для гироскопов.
Видео
Купить на Banggood | AliExpress
Просьба опубликовать статью о сборке, комплектующих квадрокоптера для фото съемки, полностью автономного полета.
1. с подвесом для тяжелой проф камеры. примерно до 3кг
2. GPS(одиночкой точностью до 0,5-1м), либо связка с земным GPS, для более точного позиционирования. (какие есть доступные мобильные версии)
3. с ПК, которому можно назначить автополет, полет по периметру (например как может делать для Dji программа Pix4D)
Тут нужно либо много денег на готовый вариант (DJI), либо много времени и опыта (ArduCopter, iNav). Готовых рецептов нет, гугл в помощь, смотрите кто, что собирал и что из этого вышло, делайте выводы и учитесь на чужих ошибках.
А что за приблуда на лучах и для чего она.
Это платы-переходники Race wire, для быстрой замены моторов. https://blog.rcdetails.info/pechatnaya-plata-race-wire-dlya-regulyatorov-4-v-1/