Количество полётных контроллеров, имеющихся в продаже, может смутить новичка. Цель этой статьи — показать каким образом можно выбрать подходящий для вашего коптера.
Оригинал: How to Choose Flight Controller for Quadcopter
Если вы только начинаете летать, тогда не забудьте прочесть руководство для начинающих пилотов гоночных коптеров.
Я собрал все характеристики всех полетных контроллеров в одну таблицу, так что вы легко их сможете сравнить.
Содержание
- Что такое полетный контроллер?
- Подключение
- Прошивки
- Процессор (микроконтроллер)
- UART (последовательные порты)
- Гироскопы (Gyro)
- Расположение элементов
- Полетные контроллеры «всё-в-одном» и их функционал
- Регуляторы скорости «4-в-1» и ПК «всё-в-одном»
- Формат крепежа
- Прочие функции
- Демпфирование (антивибрационное крепление)
- Выбор полетного контроллера
Что такое полетный контроллер?
Полетный контроллер (ПК, flight controller, FC) — это мозг летательного аппарата. По сути, это плата с кучей датчиков, которая отслеживает движение дрона и команды от пользователя. Используя полученные данные, она управляет скоростью вращения моторов для того, чтобы коптер двигался так, как задумал пилот.
У всех ПК имеется базовый набор датчиков: гироскопы (Gyro) и акселерометры (acc); некоторые продвинутые конфигурации имеют также барометр (измеряет давление воздуха, а значит и высоту полета) и магнитометр (компас).
ПК — это также точка подключения всей прочей периферии типа GPS, светодиодов, сонаров и т.д.
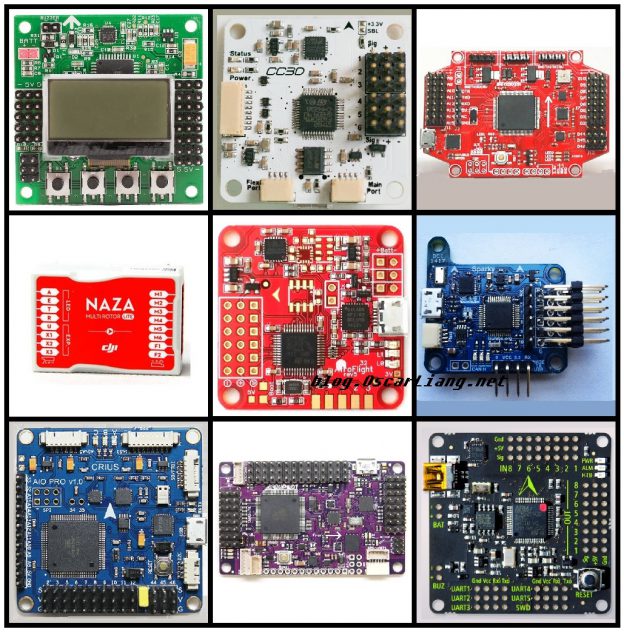
Контроллеры для гоночных дронов очень быстро эволюционируют: становятся меньше, имеют всё более быстрые процессоры, более современные датчики и всё больше встроенных функций.
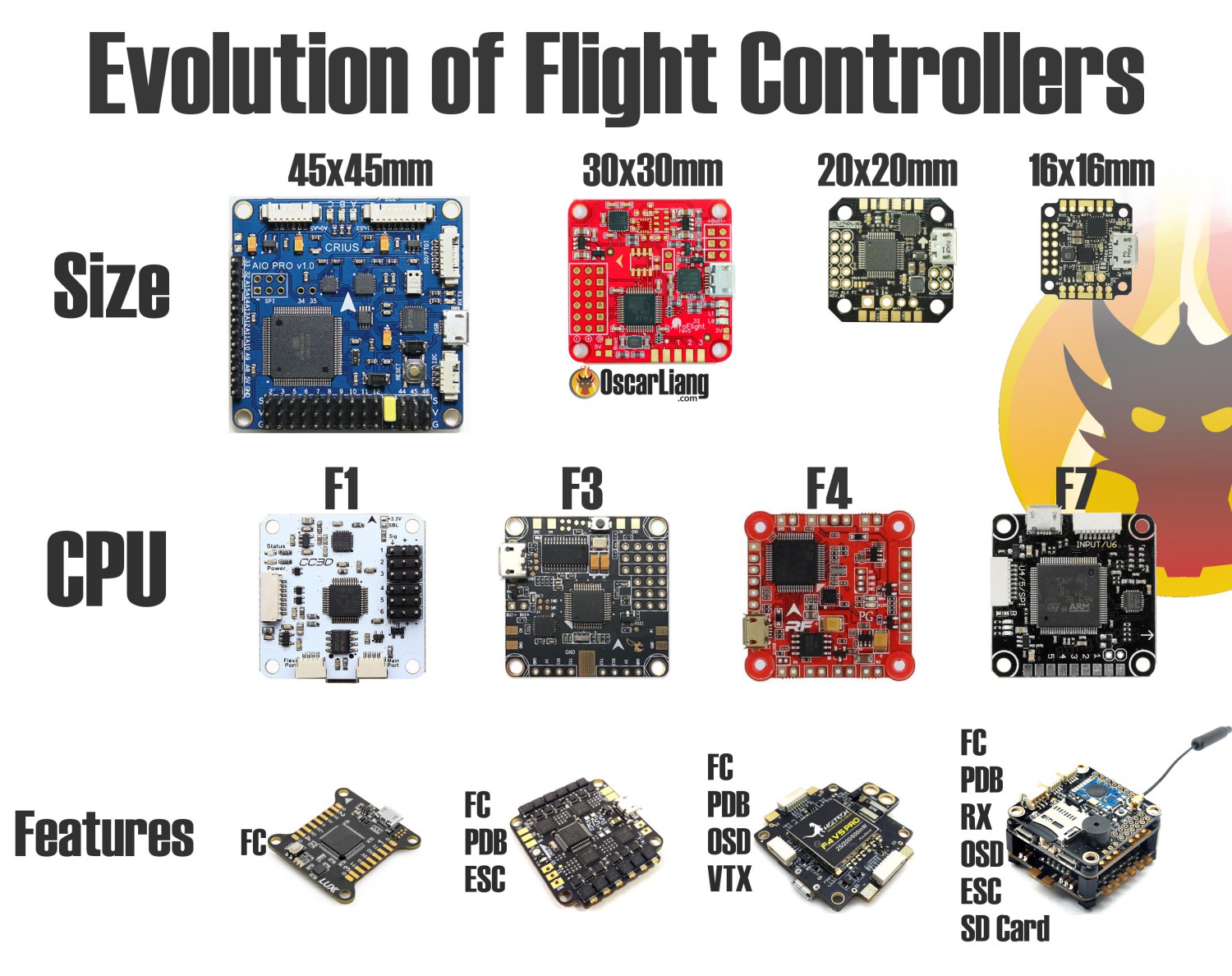
Эволюция полетных контроллеров
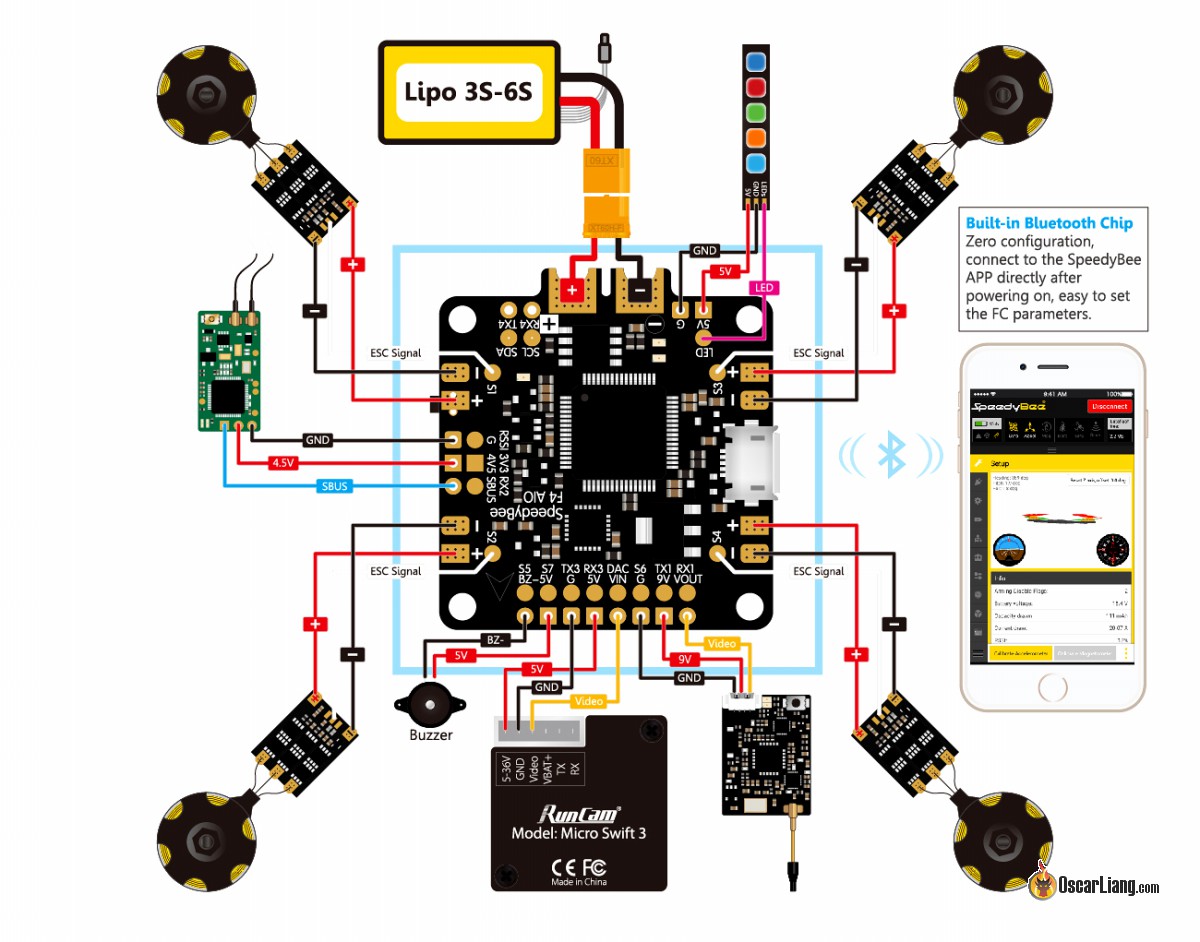
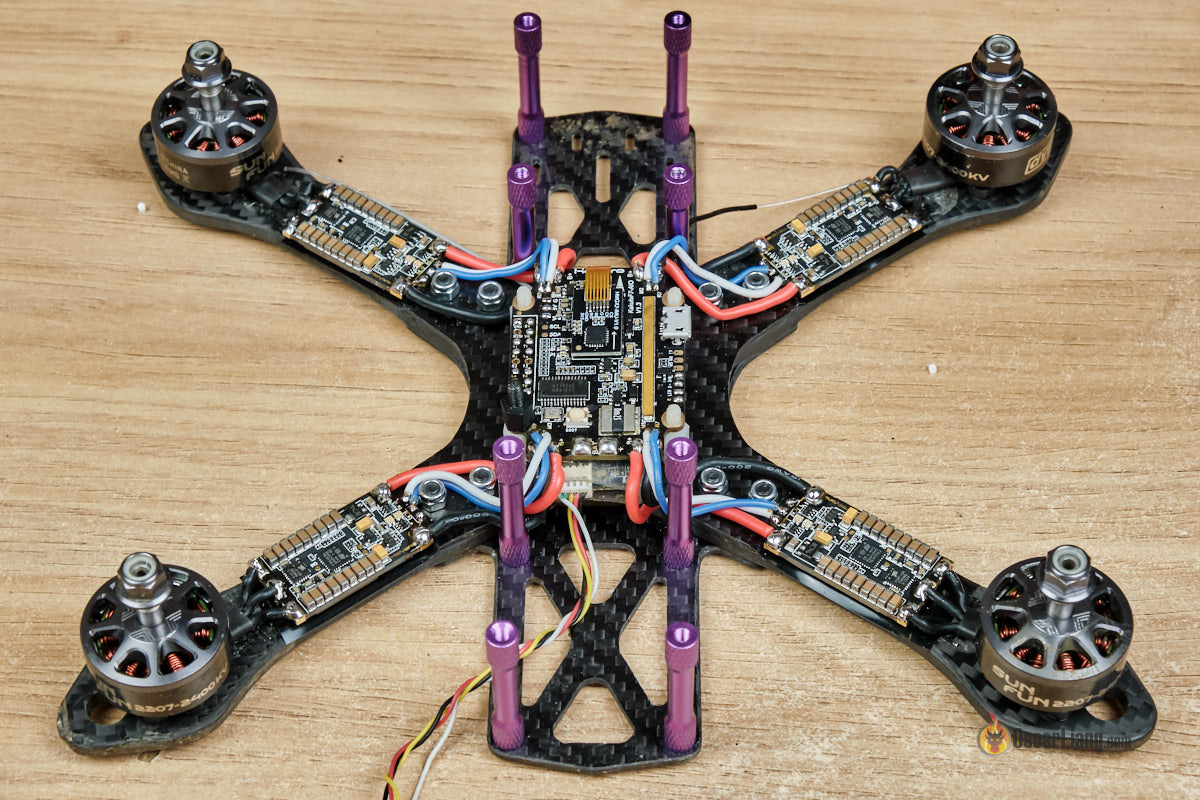
Подключение
Вот пример подключения всех основных компонентов коптера к полетному контроллеру.
Прошивки для ПК
Помимо различий в железе, имеются различия и в прошивках, которые работают на этих ПК и у которых разный функционал и разные области применения. Например, iNAV разработан для использования с GPS, а KISS — больше предназначен для гонок.
Вот список прошивок для мини-коптеров. Если вы совсем в этом не разбираетесь, то мой вам совет, используйте Betaflight.

Самые популярные прошивки для полетных контроллеров
Betaflight — это прошивка с открытым исходным кодом, разрабатывается и поддерживается сообществом хоббийщиков. У нее самая большая пользовательская база, так что в случае каких-то вопросов вам быстро помогут. К тому же она поддерживает максимальное число полетных контроллеров.
Другие популярные прошивки для FPV дронов — это FlightOne и KISS. Их исходный код закрыт, а железо и сами прошивки поддерживаются только производителями, так что с ними работает очень небольшое число полетных контроллеров.
После того, как вы выберите прошивку, ищите совместимый с ней полетный контроллер.
Интерфейс и настройка
Современные прошивки для ПК можно настраивать, используя специальные программы, установленные на компьютер или смартфон; или даже прямо с пульта управления. У каждой прошивки свой пользовательский интерфейс управления, при помощи которого меняются настройки. Некоторые программы очень похожи друг на друга, но установка одних и тех же параметров в разных прошивках может дать совершенно разный результат, так что не торопитесь, а основательно изучите выбранную прошивку.
«Тюнинг» — этот термин мы используем, когда меняем ПИД коэффициенты (PID), рейты (rates) и некоторые другие настройки. При помощи тюнинга мы можем настроить коптер «под себя».
Процессор (микроконтроллер)
Процессоры в полетных контроллерах на самом деле должны называться не процессорами, а микроконтроллерами; в них хранится прошивка и они же её исполняют.
В настоящее время есть 5 основных типов процессоров: F1, F3, F4, F7 и H7. В основном они отличаются размером памяти и вычислительными мощностями.
| F1 | F3 | F4 | F7 | H7 | |
| Частота | 72 МГц | 72 МГц | 168 МГц | 216 МГц | 480 МГц |
| Память | 128 кБ | 256 кБ | 1 МБ | 1 МБ | 128 кБ |
Подробнее про различия между сериями процессоров F1, F3, F4 и F7
Мы рекомендуем брать F4 или F7, новые прошивки уже не поддерживают серии F1 и F3, т.к. в них недостаточно места.

Процессоры для ПК (слева направо): STM32 F1, F3, F4
UART (последовательные порты)
UART расшифровывается как Universal Asynchronous Receiver/Transmitter, что означает асинхронный последовательный порт.
UART — это, как правило, аппаратный последовательный интерфейс, который позволит вам подключить разные внешние устройства к полетному контроллеру. Например, приемник, телеметрию, транспондер для гонок, управление видеопередатчиком и т.д.
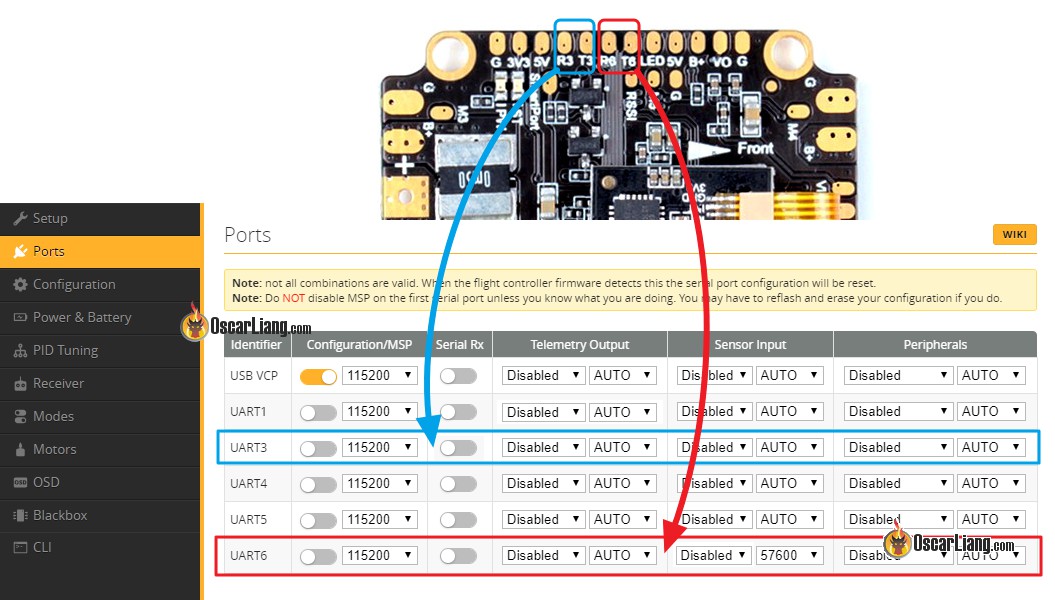
У каждого последовательного порта два контакта: TX — для передачи, RX — для приема. Запомните, TX на периферийном устройстве подключается к RX на полетном контроллере и наоборот!
Пример: на полётнике есть UART3 (контакты R3 и T3) и UART6 (контакты R6 и T6). Вы можете назначить им задачи на вкладке Ports в Betaflight конфигураторе.
Количество последовательных портов в полетном контроллере
Возможно, вам потребуются (а может и нет) дополнительные последовательные порты, чем больше свободных есть, тем проще будет в будущем.
Количество портов зависит от дизайна платы и используемого процессора. Например, на ПК с F1 обычно только 2 порта, у F3 и F4 может быть от 3 до 5, а у F7 — шесть или даже 7.
| F1 | F3 | F4 | F7 |
| 2 порта | 3-5 портов | 3-6 портов | 6-7 портов |
Инвертирование сигнала последовательного порта
Процессоры F3 и F7 могут инвертировать сигнал встроенным инвертором, а F1 и F4 — нет.
Сигналы Frsky SBUS и SmartPort являются инвертированными, поэтому владельцам ПК на F3 и F7 повезло, такие данные понимаются без проблем (F3 и F7 — более новые серии процессоров, подробнее тут).
Однако, более старые процессоры, типа F1 и F4 требуют наличия внешнего инвертора сигнала, который и подключается к соответствующему последовательному порту. Для удобства пользователей некоторые ПК на F4 уже имеют схемы для инверсии сигналов SBUS и SmartPort, так что приемник подключается напрямую к ПК. Если встроенного инвертора нет, то вам придется использовать одно обходных решений, например, программную эмуляцию последовательного порта (soft serial) или найти неинвертированный сигнал на приемнике.
Если портов не хватает, можно использовать программную эмуляцию (soft serial) чтобы «создать» ещё больше портов. К сожалению, эмулируемые порты работают медленнее аппаратных (нельзя выставить большую скорость) и не подходят для важных задач, где требуется быстрая реакция, например не подойдут для работы с приемниками. Ну и, конечно, программная эмуляция требует довольно много ресурсов процессора.
Гироскопы (Gyro), инерциальная навигация (IMU)
Цель датчиков на ПК определить ориентацию коптера в пространстве и отследить его движения. Микросхема с датчиками (IMU) содержит как гироскопы, так и акселерометры.
Самые часто используемые полетные режимы Betaflight — это, наверное, Acro (акро, или ручной режим) и Angle (самовыравнивание). В акро режиме используются только гироскопы, а в Angle и гироскопы, и акселерометры.
А т.к. большинство пилотов FPV дронов летают в Acro, то акселерометры часто просто отключаются в настройках Betaflight, это позволяет сэкономить вычислительные ресурсы. По этой же причине под инерциальной навигацией обычно подразумевают только гироскопы (gyro).
Наиболее популярные гироскопы, используемые в полётниках:
| IMU | Способ подключения, шины | Макс. частота сэмплирования |
| MPU6000 | SPI, i2c | 8K |
| MPU6050 | i2c | 4K |
| MPU6500 | SPI, i2c | 32K |
| MPU9150* | i2c | 4K |
| MPU9250* | SPI, i2c | 32K |
| ICM20602 | SPI, i2c | 32K |
| ICM20608 | SPI, i2c | 32K |
| ICM20689 | SPI, i2c | 32K |
* MPU9150 — это MPU6050 со встроенным магнитометром AK8975, а MPU9250 — это MPU6500 с тем же магнитометром.
Выяснить тип можно взглянув на маркировку микросхемы, вот для примера популярный вариант Invensense MPU-6000.

Гироскопы и акселерометры на полетном контроллере
Выбор гироскопов: что лучше высокая частота опроса или шум?
У IMU есть две основные характеристики: максимальная частота сэмплирования и насколько полученные данные будут зашумлены (механическими вибрациями и электрическими помехами).
В настоящее время очень часто используют микросхему MPU6000, которая поддерживает частоту опроса до 8k, и обладает (неоднократно проверено) хорошей устойчивостью к разного рода шумам и помехам. Главное стараться избегать MPU6500 и MPU9250, хотя у них больше рабочая частота, но и уровень шумов тоже значительно выше.
Учтите, что разные серии гироскопов ICM имеют разные характеристики. ICM20689 — один из худших вариантов, легко восприимчив к шуму, да и с надежностью проблемы. Если приходится выбирать из ICM, то берите модель 20602.
В последнее время появляется всё больше и больше ПК с гироскопами на отдельной плате с антивибрационной развязкой (кусок поролона, чтобы снизить вибрации от моторов).

Антивибрационное крепление гироскопов на ПК Kakute F4
Обновление (окт 2019). Начиная с версии Betaflight 4.1 нет поддержки частоты 32кГц, так что если вы используете гироскопы ICM с Betaflight, то looptime будет не больше 8кГц.
Скорость работы гироскопов — это палка о двух концах: если питание чистое, и шумов нет, тогда серия ICM на 32k будет работать лучше, чем MPU6000. Однако, если регуляторы и моторы начнут генерировать помехи, а коптер вибрирует, тогда ICM хуже, чем MPU6000.
Несколько советов как крепить ПК с демпферами (антивибрационное крепление) и использовать конденсаторы для фильтрации помех по питанию.
i2c или SPI?
i2c и SPI — это названия шин для подключения гироскопов к процессору. Выбранная шина может ограничить частоты опроса гироскопов и ограничит looptime.
Лучше всего использовать SPI, т.к. она позволяет работать с бОльшими частотами, чем i2c, у которой лимит в 4k. Практически все современные ПК используют SPI.
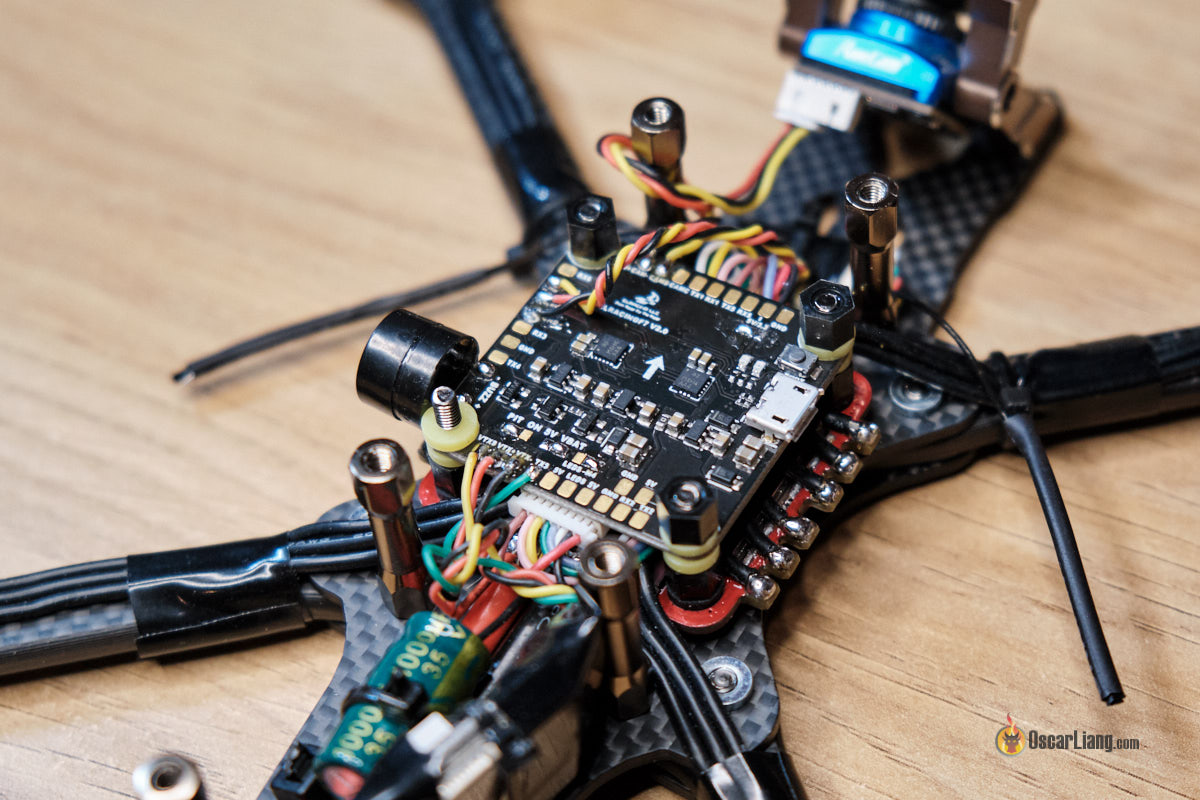
Расположение элементов
Расположение контактов и разъемов влияет на простоту сборки.
Многие пилоты смотрят только на технические характеристики полетных контроллеров и упускают важность дизайна/компоновки элементов.
Хорошие пример — CLRacing F7 и Kakute F7. Два отличных полётника, с уверенностью могу их порекомендовать, но глядя только на компоновку скажу, что CLRacing F7 однозначно выигрывает, все контактные площадки расположены по краям платы и сгруппированы по выполняемым функциям. Контакты на Kakute скучкованы, в результате легко получить комок проводов.

Полетный контроллер CL Racing F7

Полетные контроллер Kakute F7
Это дело вкуса, а он у всех разный.
Полетные контроллеры «всё-в-одном» и их функционал
Полетники «Всё-в-одном» («All In One») имеют встроенную плату распределения питания (PDB) и огромные контакты для толстых проводов, идущих от аккумулятора. Термин появился в те времена, когда обычно применялись отдельные PDB со стабилизаторами питания для полетных контроллеров, но сейчас в ПК встраивают очень много компонентов, так что термин теперь значит немного другое.
Одной из первых функций, которую встроили в ПК — это OSD (экранное меню) — Betaflight OSD.
Ещё одна бесценная фишка — датчик тока: с ним гораздо проще оценить степень разряда аккумулятора, и он же отличный инструмент для тестирования. Тут более подробно про его калибровку (англ).
Также часто в ПК встраивают барометр и магнитометр (компас).
Нет «правильного» полётника «все-в-одном», но при желании можно найти плату, в которой есть всё, даже приёмник, видеопередатчик и даже регуляторы.
Первым таким ПК у меня был RacerStar Tattoo F4S, он не очень надежный.
Регуляторы скорости «4-в-1» и ПК «всё-в-одном»
Сейчас регуляторами «4-в-1» никого не удивишь, и часто они разработаны для сборки в стек с конкретным полетным контроллером и в этом случае они играют роль PDB. Разъемы и схемы соединений не стандартизированы, так что перед покупкой убедитесь в совместимости ПК и таких регулей.
Можно ли использовать полетный контроллер типа «всё-в-одном» с регуляторами «4-в-1»? Да, можно, но мы не рекомендуем.
ПК «все-в-одном» лучше использовать с 4 отдельными регуляторами.
Обычный полетный контроллер лучше совмещать с PDB и отдельными регуляторами или с регуляторами «4-в-1».
Формат крепежа
В данном случае подразумевается расстояние между монтажными отверстиями в плате полетного контроллера. Обычно это 30,5 х 30,5 мм, 20 х 20 мм или 16 х 16 мм. Формат крепежа определяет как размеры платы, так и размеры модели. В коптерах с 5″ пропами обычно используются ПК с крепежом 30,5 х 30,5, в более мелких коптерах — 20 х 20 мм. Формат 16 х 16 мм набирает популярность в классе коптеров с диагональю до 100 мм.

Прочие функции
Blackbox (черный ящик): чип флэш-памяти или MicroSD карточка?
Данные черного ящика (англ.)
Есть два способа записать и сохранить данные черного ящика: на чип флэш-памяти, установленный на плате ПК или на MicroSD карточку, вставленную в слот.
Чип памяти дешевле, но как правило он имеет небольшую ёмкость и хранит относительно немного данных. Обычно 10 — 20 минут полетного времени (в зависимости от частоты запрашиваемых данных). Кроме того, загрузка данных с этого чипа идет довольно медленно, может уйти до 5 минут времени на загрузку лога длиной всего 1 минуту.
ПК со встроенным слотом для MicroSD карточек, позволяют хранить данные неделями, без необходимости очистки свободного места. Кроме того, чтение логов очень быстрое.
Логи черного ящика больше нужны опытным пилотам, для диагностики почти незаметных проблем с летными характеристиками; и для гонщиков, старающихся выжать всё возможное из своего коптера. Для обычных хоббийщиков он, возможно, и не нужен.
Кстати, есть еще третий вариант — можно купить внешний логгер (Open Logger) со слотом для microSD и подключить его через свободный UART к ПК.
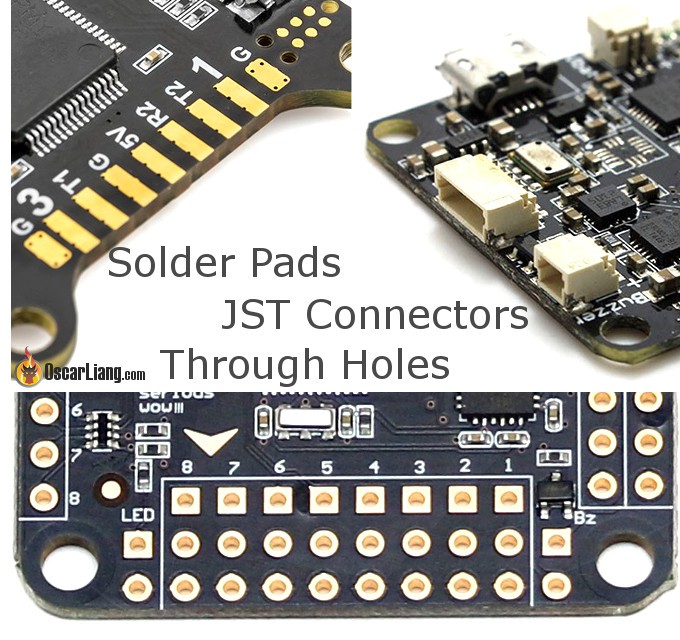
Типы разъемов
Три основных типа разъемов на полетных контроллерах:
- Пластиковые разъемы типа JST
- Контактные площадки («пятаки») для пайки проводов
- Сквозные отверстия
Пластиковые разъемы менее надежны, но при этом позволяют быстро отключать/подключать кабели. Контактные площадки более крепкие, но есть риск их перегреть при пайке, и тогда они отслоятся от платы. Наиболее универсальный вариант — сквозные отверстия: можно припаять провода или штыревые разъемы.
- Совет: как выпаять штыревые разъемы (англ)
- Совет: как восстановить отслоившиеся контактные площадки (англ)
BEC (стабилизатор напряжения)
В большинстве полётников уже есть стаб на 5 вольт. В некоторых есть и на 9, и 12 вольт (или на какое-нибудь другое напряжение). Эти стабилизаторы часто называют BEC (battery eliminator circuit).
Несмотря на то, что значительную часть FPV оборудования (камеры, видеопередатчики) можно подключать напрямую к литиевому аккумулятору, я считаю, что изображение будет лучше, если питать их через стабилизатор.
Подробнее про подключение FPV оборудования для минимизации помех (англ).
Управление камерой
Позволяет настраивать курсовую камеру прямо с аппы и через Betaflight OSD.
Кнопка boot (активация загрузчика)
Нажатая кнопка boot при подаче питания переводит процессор полетного контроллера в режим загрузчика (bootloader mode). В этом режиме можно обновить прошивку, даже если стандартные программы этого сделать не могут.
У многих ПК есть два контакта которые нужно закорачивать для этой цели. Но гораздо приятнее, когда стоит кнопка.
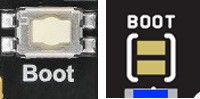
Слева кнопка загрузчика, справа — контакты для этой же цели
Демпфирование (софтмаунт, антивибрационное крепление)
Демпфирование позволяет снизить уровень вибраций, передаваемых от моторов к гироскопам. Два основных способа демпфирования полетного контроллера: резиновые стойки и шайбы. Подробнее тут.
Выбор полетного контроллера
Топ 5 лучших полетных контроллеров смотрите тут: https://blog.rcdetails.info/top-5-luchshih-poletnyh-kontrollerov-mart-2017/ (регулярно обновляется).
Список полетников со всеми характеристиками в одной таблице.
История изменений
- Декабрь 2014 — первая версия статьи
- Ноябрь 2016 — добавлена информация о прошивках, обновлен список фич в ПК
- Февраль 2017 — обновлена информация о процессорах и гироскопах
- Апрель 2017 — добавлена инфографика об эволюции полетных контроллеров, обновлен список процессоров
- Май 2018 — обновлена информация об интеграции функций в ПК
- Октябрь 2018 — добавлена информация о форматах крепежа
- Февраль 2020 — изменен адрес страницы, обновлены разделы о прошивках, гироскопах, добавлен схемы подключения и информация о платах «все-в-одном», компоновку разъемов и управление камерой
Добрый день.Подскажите подойдет ли в качестве первого опыта купить kit с алиэкспреса, просто уже 2 месяца хожу, желание купить квадрокоптер не проходит, но деньги большие вкладывать неразумно. На форумах без опыта разбираться тяжко, если не гнаться за рекордами в скорости и дальности какой выбрать ? И желательно чтобы у квадрокоптера был потенциал к развитию и аппаратура, что бы не совсем шлак( квадрокоптер не для съемок), мне приглянулся вот этот, что Вы скажете ? https://ru.aliexpress.com/item/250-Quadcopter-Full-Carbon-Fiber-Frame-Kit-RTF-Quadcopter-with-Remote-Controller/32553802969.html При выборе я рассуждал так: в комплекте нормальная аппаратура и в последствии можно доработать коптер т.е. поменять ПК с f1 на f3 (Matek F405 CTR) двигатель и регуляторы можно оставить. До куплю fpv камеру и передатчик. Пока не разобрался какие нужны аккумуляторы.
Что Вы думаете о моих рассуждениях?
Рама устарела года 2 назад, двигатели тоже устарели, регуляторы слишком слабые (12А); ни камеры, ни видеопередатчика в комплекте я не увидел. В общем, не рекомендую.
Если брать готовое, то ПК на F3, регули мин 20А; либо что-то игрушечное, «на побаловаться», типа MJI Bugs 3
Аппаратура подойдет для начинающего? И устаревшая рама чем мне грозит? Несовпадут отверстия для современных комплектующих?
Аппа какая-то простая от FlySky, я плохо знаю их модельный ряд. Это конечно лучше, чем игрушечные пульты от игрушечных коптеров, но все равно не серьезно.
Рама: старая и тяжелая.
Если только «побаловаться» — тогда можно купить этот комплект; только есть риск разочароваться именно из-за его слабеньких возможностей, сложности апгрейда, необходимости дальше (практически сразу же) вкладываться в апгрейд.
Имхо лучше потратить еще месяц, почитать статьи о сборке коптеров, и здесь, и на многих других сайтах обычно указываются конфигурации; ну и купить указанные комплектующие.
Нифига себе, тебе корона не жмет, ненавижу таких понторезов, гнут пальцы, а сами барыжат по тихому с того же алиэкспреса теми же FlySky, аппаратуру I6 не знают только те кто вобще ни разу коптерами не занимался. Дровина легко превращается в 14 канальную, из недостатков только отсутствие на приемниках RSSI, что решается перепрошивкой. И аппа очень надежная, по дальности на открытом пространстве 1300 метров держит. Так то, автор.
И в 2018 и сейчас (в 2020) не буду советовать брать i6.
P.S. Выдыхай бобер, выдыхай (с) анекдот. Уверен, что с дивана хорошо видно, кто барыжит, а кто делом занят?
Здравствуйте! Подскажите пожалуйста, я никак не могу разобраться и найти подтверждение. У меня Bayangtoys x16 GPS, хочу установить на него 3-х осевой подвес для видеосъёмки. Я так понимаю, что подвес должен быть совместим с контроллером самого коптер? Так вот какой он на баянге не могу найти. Например подвес от DJI zenmuse h3-3d, будет ли он совместим с баянгом?
Или tarot 3d. Что посоветуете. Я сам-то видео оператор, а в fpv сьемке новичок и очень хотелось бы экспертного мнения. И так нужен 3-х осевой? Читал, что лучше поменять ноги родные на фантомные, они якобы шире и в кадр лезть не будут.
Посмотрел на характеристики Bayangtoys x16 GPS, не увидел там контактов для подключения подвеса, но я мельком глядел. В первую очередь читайте rcdesign, например тут http://forum.rcdesign.ru/f135/thread463586.html
Подвес должен откуда-то получать информацию о наклоне/повороте камеры, это не обязательно должен быть полетный контроллер, это может быть отдельный приемник. Т.е. если ваш коптер не позволяет подключить подвес, тогда берете еще одну аппаратуру управления и приемник к ней, с этой аппы и будете управлять подвесом.
Но, ИМХО, это все «полумеры», вы будете больше времени тратить на управление коптером и камерой, чем собственно снимать. Поэтому смотрите на готовые решения типа mavic pro или air.
Добрый день! У меня аппаратура управления spektrum dx7 https://www.spektrumrc.com/Products/Default.aspx?ProdId=SPM2710
Юзаю её уже лет 10 все устраивает особенно дальность. Не могу понять как подключить приёмник к контроллеру Matek F405-STD
(https://banggood.com/Matek-F405-OSD-BetaFlight-STM32F405-Flight-Controller-Built-in-OSD-Inverter-for-RC-Multirotor-FPV-Racing-Drone-p-1141282.html)
Есть ли какой то способ это сделать или только менять аппаратуру что не очень хочется.
Какой приемник?
Приёмник родной с сотелитом на 7 каналов. Просто я с ним на 2.5км.летаю без потери сигнала. Этим он мне и нравиться. А можете посоветовать приёмник который подойдёт для моей древней spektrum dx7 если конечно есть такие в природе.
Я не спец по спектруму, но судя по всему там только PWM выходы.
Поэтому самый простой вариант — подключать только сателлит, Betaflight их поддерживает.
Приёмник AR7000
В смысле сателлит?
В прямом. Вы же сами написали, что у вас приемник с сателлитом, вот его и подключайте к полетному контроллеру.
Сателлит без приёмника? Че-то я сомневаюсь что он будет работать без приёмника, но попробую. Спасибо за совет
Зря сомневаетесь 🙂
какую раму 250 или 300 посоветуете купить.
для проекта долгольота.
Рама
https://ru.aliexpress.com/item/Realacc-X4R-X5R-X6R-180mm-220mm-250mm-4mm-Arm-Carbon-Fiber-Frame-Kit-With-BEC-Output/32824506803.html?spm=a2g0v.10010108.1000016.1.4bf94e66JuhStx&isOrigTitle=true
https://ru.aliexpress.com/item/Realacc-Martian-IV-7-Inch-300mm-Wheelbase-4mm-Arm-Carbon-Fiber-Frame-Kit-For-RC-Racing/32873401708.html?spm=a2g0v.10010108.1000016.1.262ef781sM4b3p&isOrigTitle=true
мотори
https://ru.aliexpress.com/item/Racerstar-2207-BR2207S-1600KV-2200KV-2500KV-3-6-S/32869777530.html?spm=a2g0s.13010208.99999999.262.79fb3c00QRmvgr
регулятори
https://ru.aliexpress.com/item/4-FVT-littlebee-blheli-s-ESC-dshot-20A-ESC-blheli-S/32839158646.html?spm=a2g0s.13010208.99999999.296.79fb3c00QRmvgr
мозги
F3
Плата розводки
https://ru.aliexpress.com/item/MATEK-Mini-Power-Hub-PDB-XT60-Power-Distribution-Board-PDB-XT60-with-BEC-5V-12V-for/32796297702.html?spm=a2g0s.13010208.99999999.323.adf53c00Dlb7Nf
Что планируется на этом долголете нести? Просто HD камеру или камеру с подвесом? Для подвеса 180 размер маловат.
Регуляторы и мозги по нынешним меркам староваты (для гонок), но если не гнаться за новшествами, то вполне пойдут для долголета. Хотя, я бы подумал, и возможно выбрал бы полетник на F4 или даже на F7, чтобы было побольше последовательных портов для управления периферией: камера, видеопередатчик, приемник, GPS и т.д.
Или може рама 250
https://ru.aliexpress.com/item/REPTILE-Martian-190MM-230MM-255MM-4-Axis-Carbon-Fiber-Racing-Quadcopter-Frame-with-Power-Distribution-Board/32595899994.html?cv=e5163-8b68bb88-9b15a4-1b3f&af=115324&aff_platform=link-c-tool&cpt=1547375556497&afref=&sk=YFAI6ub&aff_trace_key=f364f8e652b4407795045a93a93577a8-1547375556497-03076-YFAI6ub&dp=uid_363509&terminal_id=83327ac1db394abd82e7373058e65cdd
Подскажите какой полетный контроллер подходит ?
Процессор STM32F407VGT6
Акселерометр: MPU6000
Компас: HMC5883
Барометр: MS5611
Память: FRAM FM25V01
Слот для MicroSD карты памяти
Планирую использовать контроллер Holybro Kakute F7 AIO V1.5
Скажите нужно ли использовать плату питания совместно с ним, или можно всё на него паять напрямую ?
Это полетник AIO, т.е. «все-в-одном», ему плата распределения питания не нужна.
Спасибо, теперь буду знать!
Добрый день, мы производим Электродвигатели и сейчас планируем собрать грузовой Дрон с подъёмной массой 224 кг. Нам необходим профессионал, который поможет подобрать и собрать правильную Электронику, включая полётный контролер. Контроллеры наших двигателей работают от 110 вольт 60А, такое напряжение необходимо что бы поддерживать частоту вращения пропеллеров в режиме 4500 об/мин, на таких оборотах тяга наших пропеллеров максимальна. Мы готовы хорошо оплатить данную помощь. Тел для связи в вотсап/телеграм/Вайбер +79601332623, емейл для связи rutrening12@gmail.com С уважением, Рубен.