Эта статья — попытка собрать основные понятия в одном месте, помочь начинающим «расшифровать» основные термины и сокращения относящиеся к мультикоптерам.
Более опытным наверняка тоже будет полезно взглянуть. Все помнят как отличить разъемы SMA от RP-SMA? 🙂
Статья будет дополняться и уточняться, так что есть смысл добавить ее в закладки и периодически обновлять.
* заглавная картинка взята с сайта www.etextlib.ru
Общие понятия
2.ГГц, 2.4Ghz — основной частотный диапазон, на котором работают современная аппаратура управления. В этом диапазоне часто используется технология FHSS (ППРЧ — Псевдослучайная перестройка рабочей частоты), которая позволяет менять частоты множество раз в секунду. Это избавляет от интерференции, и позволяет нескольким передатчикам диапазона 2.4ГГц работать одновременно.
AWG (American Wire Gauge) — американский калибр проводов. Чем меньше число, тем более толстый провод, а значит тем бОльший ток через него можно пропустить. Как правило провода к сервомашинкам будут AWG 26, к моторам мини-коптеров AWG 18-20.
BEC — Battery Eliminator Circuit. Небольшая схема снижающая напряжение аккумулятора до 5 вольт (бывают варианты и на другие напряжения, 6, 7.2, 8.4 В и т.д.). Выпускаются в виде самостоятельного устройства или частью ESC (см. ниже). Используется для питания разнообразной электроники на борту: полетного контроллера, приемника управления и т.д. Характеризуется выходным напряжением (5, 6, 7.2 В и т.д.) и максимально допустимым током (как правило до нескольких ампер).

UBEC, с максимальным током 3А (пиковое до 5А) и напряжением 5В или 6В (настраивается)
ESC — Electronic Speed Controller, регулятор, регуль. Схема для управления скоростью (и направлением) вращения двигателей. Питание подается напрямую от аккумулятора. Имеет разъем (серворазъем) для подключения к приемнику управления или к полетному контроллеру, через него получает сигнал управления. Регуляторы для мультикоптеров, как правило, имеют специальную прошивку (BLHeli или SimonK) и дополнительные возможности (DampedLight и oneShot125) по сравнению с регуляторами для самолетов или машин. Основная характеристика — максимально допустимый ток. Иногда дополнительно указывается максимально допустимый кратковременный ток (как правило до 10 секунд). Превышение тока означает перегрев регулятора и выход его из строя.
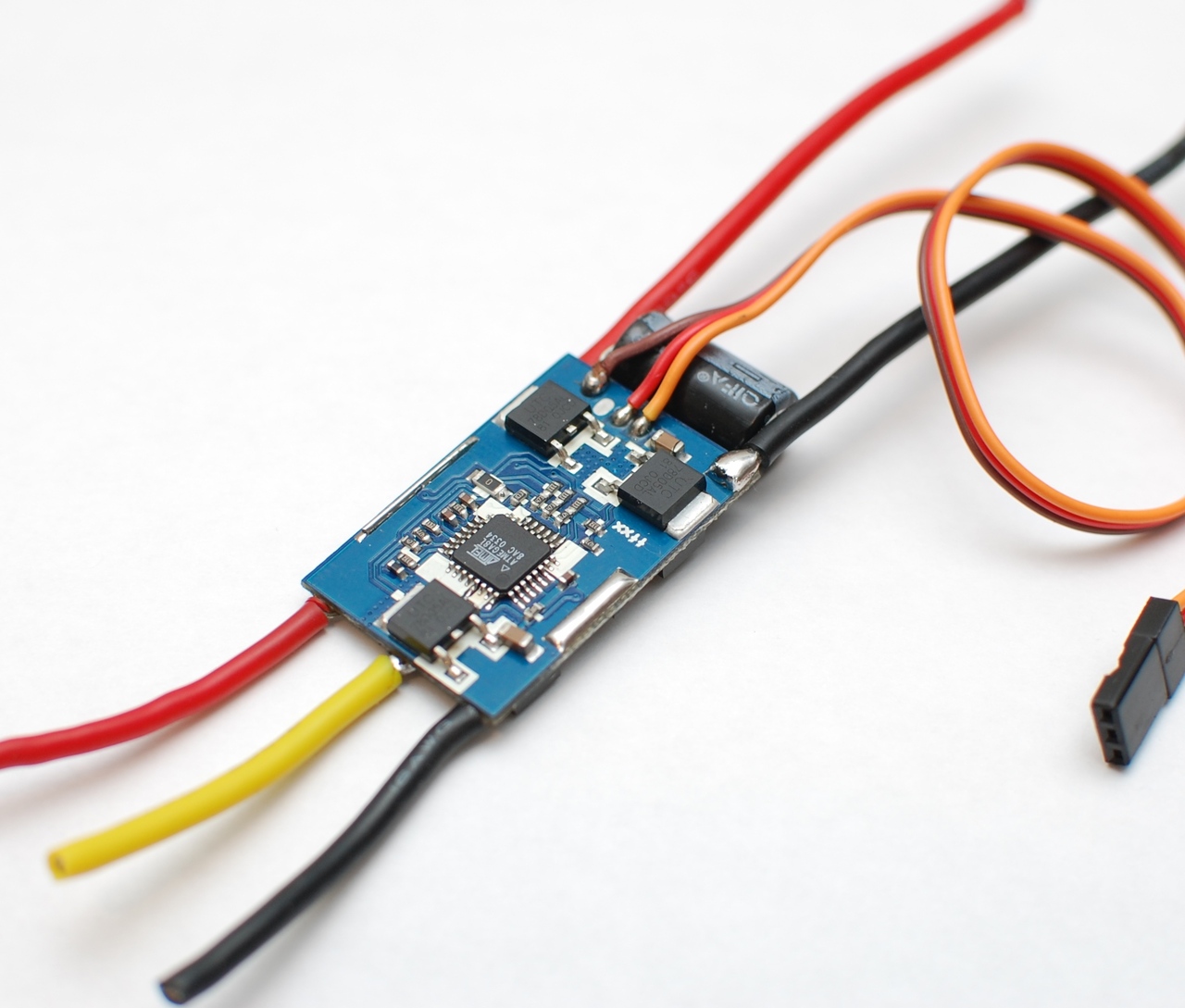
ESC, регулятор
DampedLight — активное торможение, функция регулятора, используется на мультикоптерах. Подробнее.
OneShot, OneShot125 — новый протокол управления регулятором. Значительно более быстрый по сравнению с обычным PWM. Позволяет более точно стабилизировать коптер. Подробнее.
Dean’s, динсы, T-connector, Т коннекторы — тип разъема на аккумуляторной батарее. Имеет 2 контакта, повернутых относительно друг друга на 90 градусов. Устарел, в настоящее время как правило используются разъемы XT60.
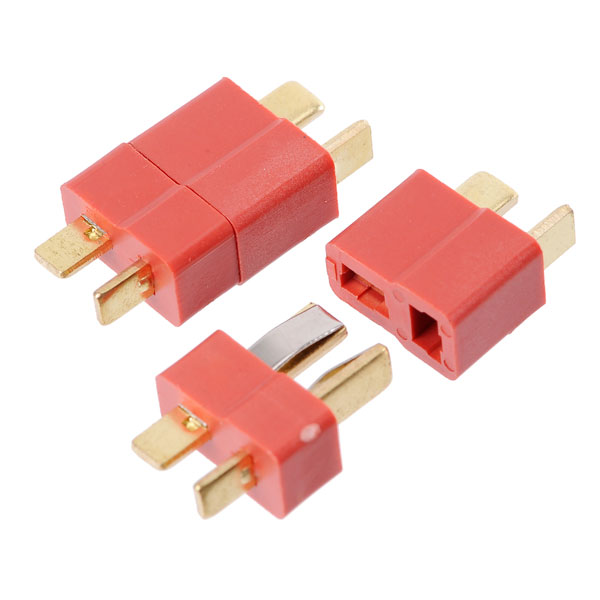
Deans, T-connector
XT-60 — наиболее популярный разъем на аккумуляторах. Отличная статья про виды разъемов.

XT60
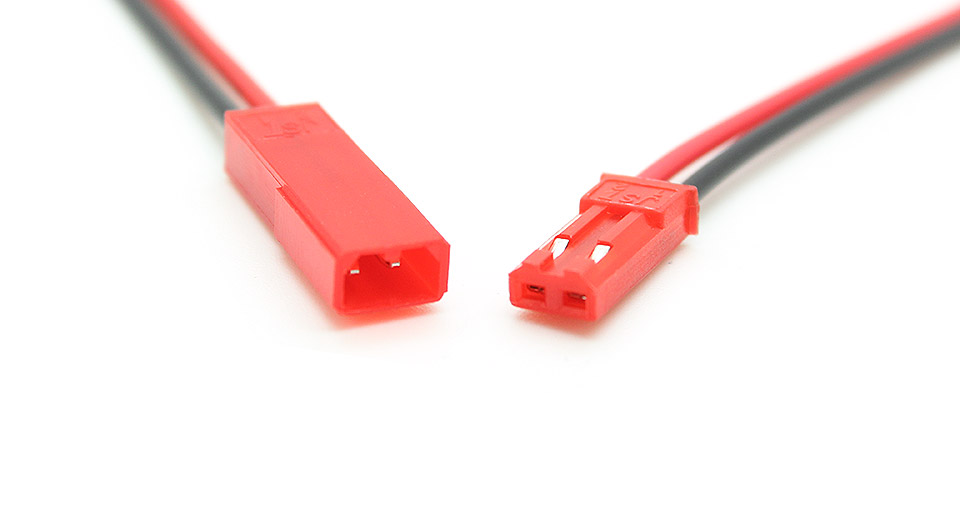
JST разъем. Это разъем небольших аккумуляторов, либо аккумуляторов с небольшим разрядным током (например для аппаратуры управления, наземных станций и т.д.).
JST-XH разъем. Это тип балансировочного разъема аккумуляторов (см. ниже). Количество контактов зависит от числа ячеек в аккумуляторе.
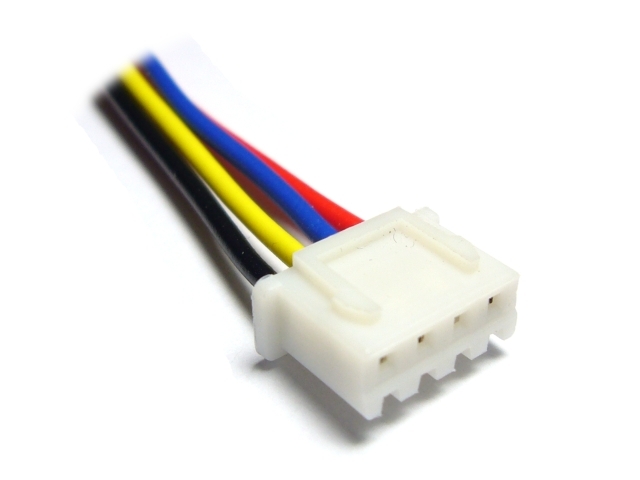
Разъем JST-XH для аккумулятора 3S
Балансировка, Balance — выравнивание напряжений на отдельных ячейках аккумулятора.
Балансировочный разъем, Balance Connector — разъем на аккумуляторе, предназначен для заряда/разряда и мониторинга отдельных ячеек аккумулятора. См. JST-XH
Разъем JST-XH для аккумулятора 3S
mAh, мАч, мА*ч. — миллиампер в час, часто используется как характеристика емкости аккумулятора. Подробнее: ампер*час.
1S, 2S, 3S, 4S и т.д. — количество последовательно соединенных ячеек аккумулятора. Напряжение ячейки LiPoly: от 3В (аккумулятор разряжен) до 4.2В (полностью заряжен). Подробнее.
10C, 20C, 45C и т.д. — так обозначается максимальный разрядный ток. Под «C» подразумевается емкость аккумулятора. Например, аккумулятор 1300мАч с рейтингом 30C, получается что C = 1300мАч = 1.3 А*ч, умножаем на 30, т.е. максимальный разрядный ток для этого аккумулятора 39А. Конечно, нужно учесть, что разряд аккумуляторов с токами около максимально допустимых и тем более при превышении их — это значительное сокращение срока их эксплуатации. Подробнее тут.
FPV — First Person View — Вид от первого лица. Метод управления самолетом/коптером/машинкой с точки зрения водителя или пилота. Видеокамера установленная на мультикоптере передает изображение пилоту на экран монитора или в видео очки. Хорошая статья для тех кто начинает летать по камере.
Gimbal или подвес — крепление для камеры, имеющее гироскопы и двигатели для компенсации наклона коптера.

Gimbal, подвес
JR Module — высокочастотный модуль аппаратуры управления в формате JR. Есть несколько основных видов модулей, называемых по фирмам производителям: Futaba, JR. Например, в пульт Turnigy 9XR можно поставить радиопередатчик чтобы использовать приемники других фирм или на другой частоте, например OpenLRS 433МГц.


kV — обороты мотора на каждый Вольт поданного напряжения (без винта). Моторы с высоким значением kV (~2300) используются в миникоптерах, при этом нужны небольшие винты — диаметром 5-6 дюймов. Моторы с низким kV (~750) предназначены для тяжелых, больших мультикоптеров, они вращаются медленнее но с бОльшим усилием.
LOS — Line of Sight — Поле зрения, если про полет, то «в поле видимости/зрения». Стиль управления, когда мультикоптер находится в поле зрения пилота, т.е. пилот смотрит на него со стороны (в отличие от FPV). При этом видео передатчик и приемник не нужны.
OSD — On Screen Display. Экранное меню. Текстовая или графическая информация накладываемая поверх изображения с камеры. Например: напряжение на аккумуляторе, ток потребляемый моторами и прочей электроникой, горизонт, координаты GPS и т.д. Подробнее про OSD.

PDB — Power Distribution Board, плата распределения питания. Простой и аккуратный способ развести провода питания к регуляторам, видео передатчику, камере и т.д. Бывают как небольшие отдельные платы размером с полетный контроллер, так и части рам. Это необязательный компонент мультикоптера.


Retracts, ретракты — тип посадочных шасси. Опускаются и поднимаются по команде с пульта или от полетного контроллера. Нужны для того, чтобы шасси не попадали в кадр, если камера смонтирована снизу. Пример — DJI Inspire 1.

DJI Inspire 1
RTF — Ready To Fly, готовый к полету. Так называют комплекты, включающие все необходимое (даже аппаратуру управления).
Rx, Receiver, в англоязычных статьях — приемник, через который осуществляется управление коптером/самолетом и т.д. Приемник для видео сигнала обозначается как VRx.

Servo, сервомашинка, серва. Небольшой мотор с редуктором, управляется через приемник, или полетный контроллер. На самолетах нужен для управления элеронами, рулями. На трикоптерах — для отклонения одного из моторов, на прочих коптерах — для выпуска шасси. Характеризуются усилием на валу, скоростью вращения и рабочим напряжением. Подробнее на Википедии.

Сервомашинка
Telemetry, телеметрия — необязательное оборудование, позволяющее коптеру передавать полетную информацию на землю. Бывает нескольких видов: отображается на экране при помощи OSD, передается на аппаратуру управления, или через отдельный передатчик (и приемник) прямо на телефон/планшет/компьютер. Обычно передает: качество сигнала управления (RSSI), GPS координаты, напряжение на аккумуляторе, потребляемый ток, направление движения, скорость.
Тяга, Thrust — сила создаваемая винтом и мотором.
Взлетный вес, TOW, Take Off Weight. Общий вес коптера, включая аккумулятор, приемник, раму, кабели, моторы и т.д.
Tx, передатчик, подразумевается аппаратура управления, а не любой радиопередатчик.

Передатчик Futaba 14SG
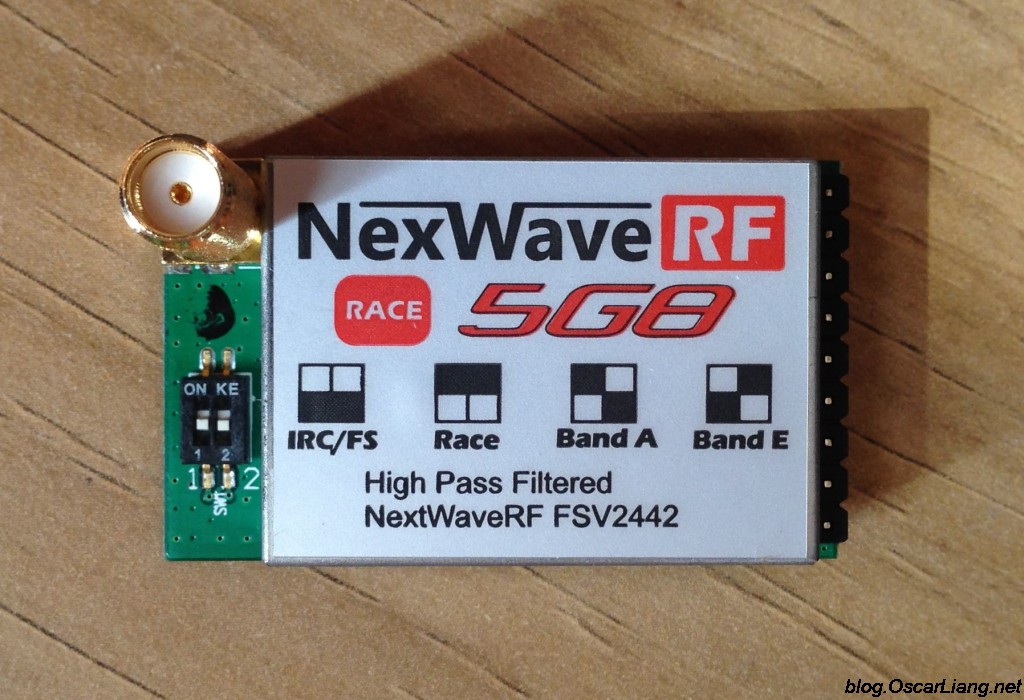
VRx, Video Receiver. Приемник видео сигнала. Рассчитан на работу в одном из диапазонов, как правило 900МГц; 1.2 ГГц; 2,4ГГц; 5,8ГГц. В гонках на коптерах используется диапазон 5.8ГГц, из-за небольшого размера антенн.
VTx — Video Transmitter. Передатчик видео сигнала.

SMA, PR-SMA — названия разъемов для высокочастотных сигналов. Антенны, видео приемники и передатчики и т.д. Картинка чтобы наглядно показать разницу:

250 racer, миник, коптер 250 размера — типичный гоночный мультикоптер. 250 — расстояние между моторами расположенными по диагонали. Статья с уроками для начинающих.

Биндинг, Binding, — процесс привязки приемника к передатчику. После этого, приемник воспринимает команды только от этого передатчика, игнорируя все остальные. Одна из причин, почему на частоте 2.4ГГц одновременно может работать множество передатчиков.
Brushless, бесколлекторный двигатель. Хорошая статья про них.
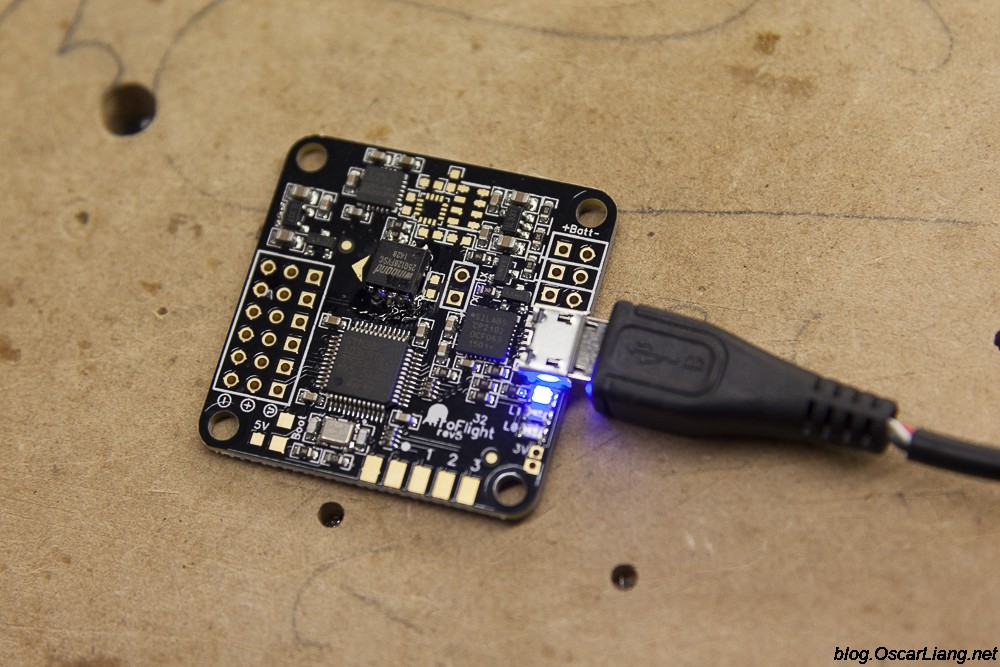
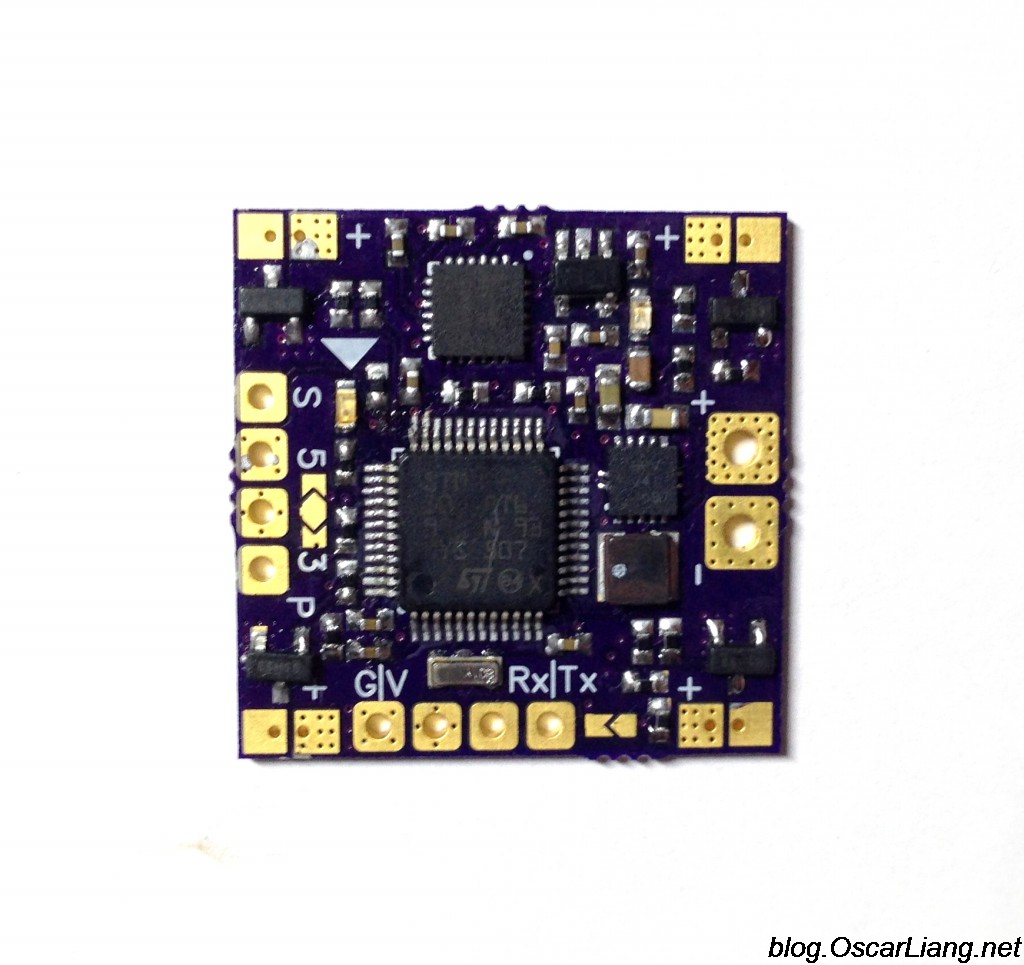
FCB, FC, КП, ПК, полетный контроллер, — Основная плата мультикоптера, его мозги. Кроме процессора содержит датчики при помощи которых отслеживает свое положение в пространстве. Подробнее на википедии.

Hex, гекса — гексакоптер, т.е. мультикоптер с 6 винтами, моторами и т.д.

Гексакоптер
LiPo — Литий-полимерный аккумулятор. Отличная, подробная статья.

Mode I, Mode II, Мода 1, 2 — тип расположения стиков на аппаратуре управления. Mode 1 — раз справа. Mode 2 — газ слева. Подробнее тут.
Octo, октокоптер. Мультикоптер с 8 моторами.

PIDs, ПИДы — P, I и D — это коэффициенты ПИД регулятора, при помощи которого мультикоптер пытается удерживать заданное положение. Новичкам лучше использовать значения по умолчанию. Подробнее тут и про настройку тут.
Quad, квадрик — квадрокоптер, мультикоптер с 4 моторами.
Возврат домой, RTH, Return To Home. Функция полетного контроллера. Позволяет автоматически вернуть коптер на точку старта, используя координаты GPS.
Трикоптер, Tri, Tricopter. Мультикоптер с 3 моторами. Для разворота им требуется наклонять один из двигателей при помощи сервомашинки, это отличительная черта трикоптеров.
Триммер, Trim — точная настройка канала управления. Например, чтобы при отпущенных стиках не было крена, т.е. самолет или коптер выравнивался.
Pitch, питч, тангаж, по простому — наклон вперед-назад. Для самолета — набор высоты или снижение. На коптерах, если аппаратура в Mode 2, контролируется правым стиком движениями вверх-вниз. Отличное описание тангажа, крена, рысканья и газа.
Roll, ролл, крен — наклон коптера влево-вправо, т.е. полет боком. На коптерах с аппаратурой Mode 2, контролируется правым стиком, движения влево-вправо. Подробнее.
Yaw, рысканье — вращение вокруг вертикальной оси, на аппаратуре Mode 2 контролируется левым стиком, движениями влево-вправо. Подробнее.
Throttle, газ — мощность двигателей. По сути скорость вдоль вертикальной оси. Если коптер горизонтален, не наклонен, то определяет скорость набора высоты, если есть наклон в какую-то сторону — тогда еще и скорость перемещения. Контролируется левым стиком на аппаратуре Mode 2, движения вверх-вниз. Подробнее.

UAV/UAS (Unmanned Aerial Vehicle/System) — беспилотный летательный аппарат/система. Это и коптеры и самолеты с автопилотом.
Режимы полета
У большинства полетных контроллеров один и тот же набор режимов, но под разными названиями.
Acro, Rate — акробатический режим. Значения стиков определяют скорость вращения коптера вокруг соответствующей оси. Когда стики отпущены (и находятся в центре), коптер перестает разворачиваться, выравниваться (становиться в горизонтальное положение) он не будет. В этом режиме летает большинство пилотов.
Horizon — В этом режиме работает автовыравнивание, если стики расположены недалеко от центра. Кроме того, в этом режиме можно делать флипы и ролы (см. ниже), если сильнее отклонить стики.
Loiter — нужен на самолетах, для полета вокруг текущего местоположения.
RTH, RTL — Return To Launch (Home) — возврат домой. В этом режиме коптер/самолет летит к точке старта (как правило перед этим он набирает безопасную высоту, чтобы избежать столкновений с кустами/деревьями/зданиями).
Датчики
Акселерометр, Accelerometer — датчик измеряющий ускорение. Для ориентации нужно 3 датчика: в настоящее время, как правило, используется одна микросхема сочетающая в себе кучу датчиков.
Барометр, датчик давления, Barometric Pressure Sensor — датчик измеряющий давление. Разница давления на земле и в месте где сейчас коптер, позволяет определить его высоту с точностью 1-2 метра.
GPS, Global Positioning System. Позволяет определить координаты, высоту, скорость относительно земли и направление движения. Обязателен для режимов удержания положения и возврата домой.
Гироскоп, Gyroscope — датчик угловых скоростей. Как и акселерометр, нужно 3 штуки, по 1 на каждую ось (крен, тангаж и курс).
Magnetometer, магнетометр, магнитный компас. Нужен для коптеров имеющих функцию RTH, на гоночных не применяется.
Optical Flow Sensor, оптический датчик движения. По сути сенсор от оптической мышки, нужен для визуальной ориентации (в дополнении к GPS). Не обязателен.
Pitot tube, трубка Пито, ПВД, приемник воздушного давления — измеряет давление набегающего потока, позволяет вычислить воздушную скорость. Используется на моделях самолетов. Не применяется на коптерах.
Ultrasonic Sensor, ультразвуковой датчик расстояния. Как правило используется при посадке коптеров, потому что обладает отличной точностью (1-2 см), но может использоваться только на малых расстояниях порядка нескольких метров.
Написано на основе статьи.