
Благодаря новым возможностям Betaflight 3.4 мы можем подключить любой передатчик (аппаратуру управления) к FPV симуляторам типа Liftoff, Velocidrone, DRL и т.д. В этом руководстве я покажу вам как это делается.
Оригинал: Connect Any Transmitter to FPV Simulators via Flight Controller
Также рекомендую посмотреть на руководство по настройке Betaflight (англ).
Зачем превращать полетный контроллер в джойстик?
Betaflight 3.4 может превратить ваш полетный контроллер в джойстик (HID устройство, драйвера не нужны). А команды, получаемые с приемника будут транслироваться в FPV симулятор!
Лучше всего то, что теперь можно использовать любой передатчик, даже без USB порта. Например, дешевый Flysky i6 (англ) или Turnigy 9X! Возможность работы в симуляторах уже не является достоинством только Тараниса.
Кроме того, соединение будет беспроводным, так что никто не ограничит вас длиной USB кабеля.
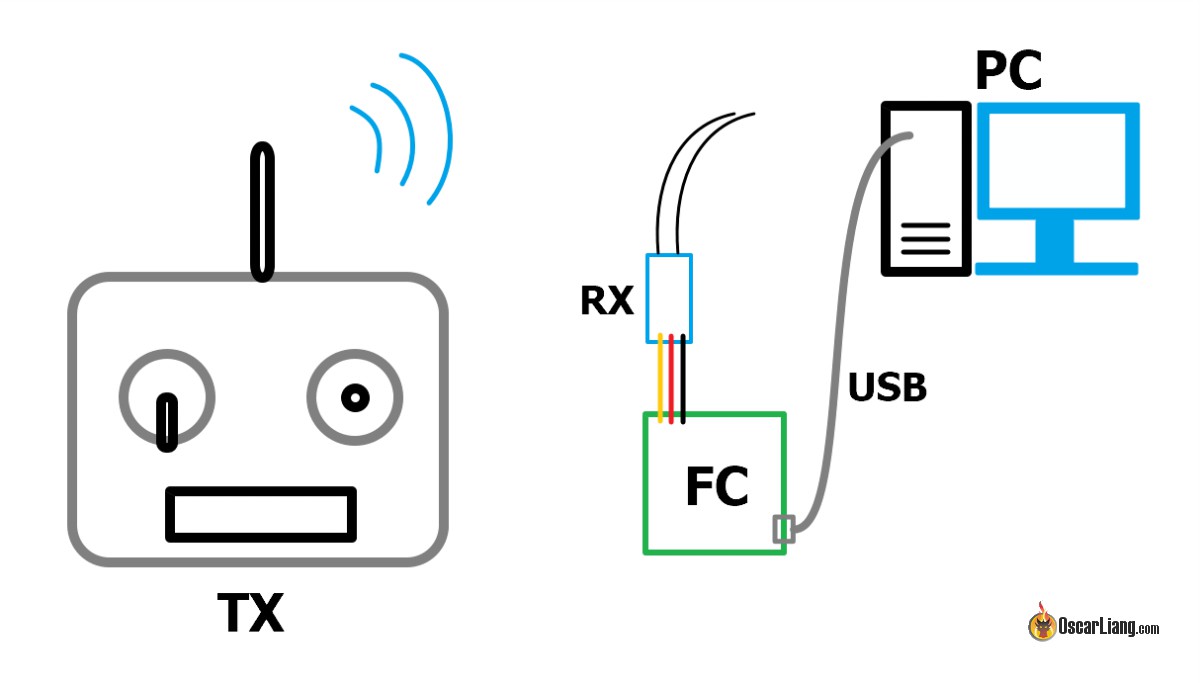
Да, я знаю, симпатичная картинка получилась. Рисовал поздно ночью, пойдет для начала 🙂
Потребуется ПК на F4 или F6 и приемник
В настоящее время поддержка этой функции есть только в контроллерах на процессорах F4 и F7. Не получится использовать ПК на F1 и F3, т.к. не хватает памяти (вот статья про отличия между сериями процессоров F3, F4, F7).
Конечно, можно настроить свой коптер для работы в качестве джойстика, но лучше взять отдельный ПК и приемник специально для симуляторов. Вот самые дешевые варианты что я нашел:
Можно даже попробовать восстановить сломанный ПК 🙂
Прошиваем Betaflight 3.4
Т.к. релизная версия Betaflight 3.4 еще не вышла, вам придется скачать прошивку самостоятельно и выбрать полученный файл в конфигураторе.
Дополнительная информация: решение проблем с драйверами для полетных контроллеров.
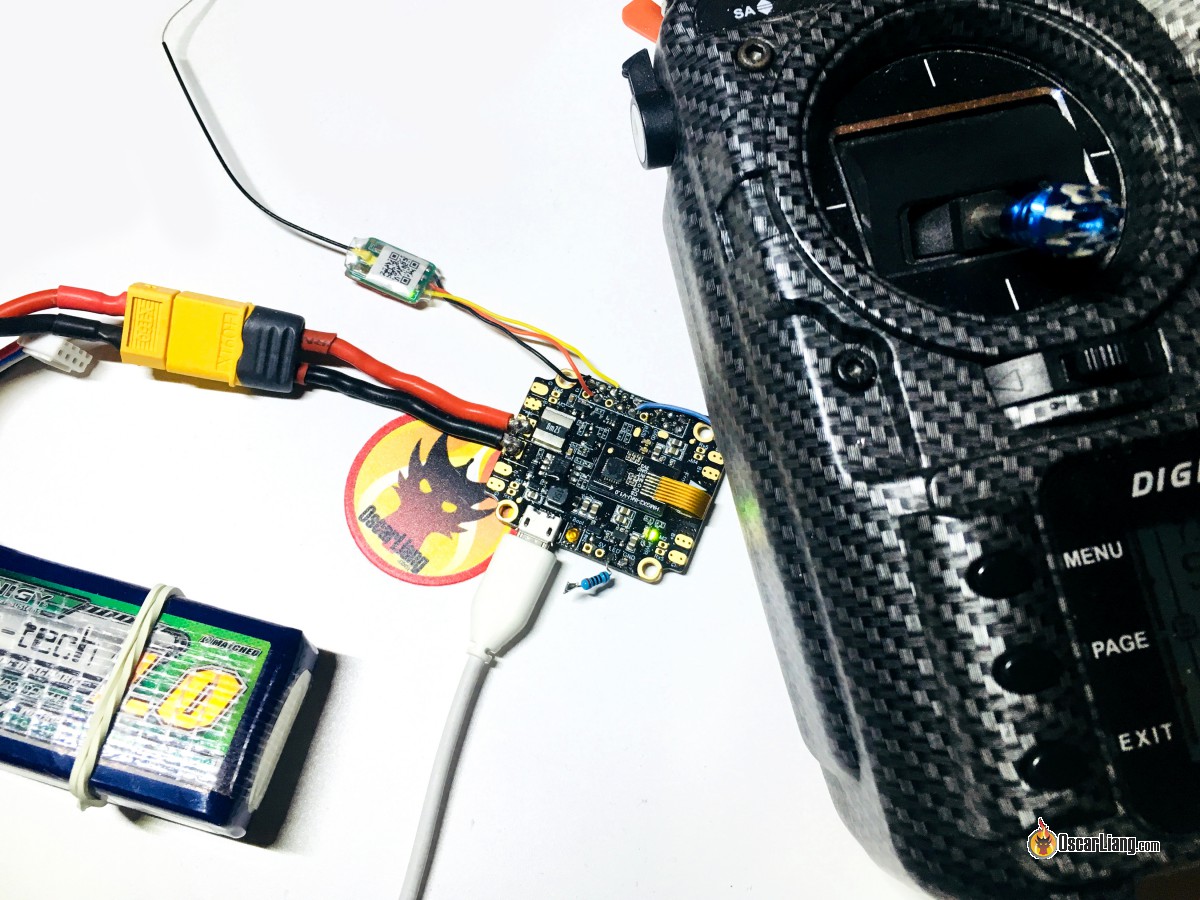
Подключаем и настраиваем приемник
Подключите приемник к полетному контроллеру и настройте его в Betaflight как обычно это делаете для коптера, вот инструкция по настройке SBUS. Поддерживаются все протоколы в приемниках: PPM, SBUS, PWM, iBUS, DSMX, Crossfire…
Вот пример, как я использую приемник Frsky XM (SBUS) с контроллером Kakute F4 V2 AIO:
Подали питание на приемник?
Некоторые полетные контроллеры не подают питание на приемник, если сами подключены по USB, так что возможно придется подключить LiPo аккумулятор (а еще лучше найти где на плате есть 5 вольт — стандартное напряжение на USB и подать их на приемник, прим. перев).
Если вы решите подключить LiPo аккумулятор, то лучше отсоединить видеопередатчик и другие комплектующие во избежание их перегрева. Ну и на всякий случай убедитесь, что пропеллеры сняты.
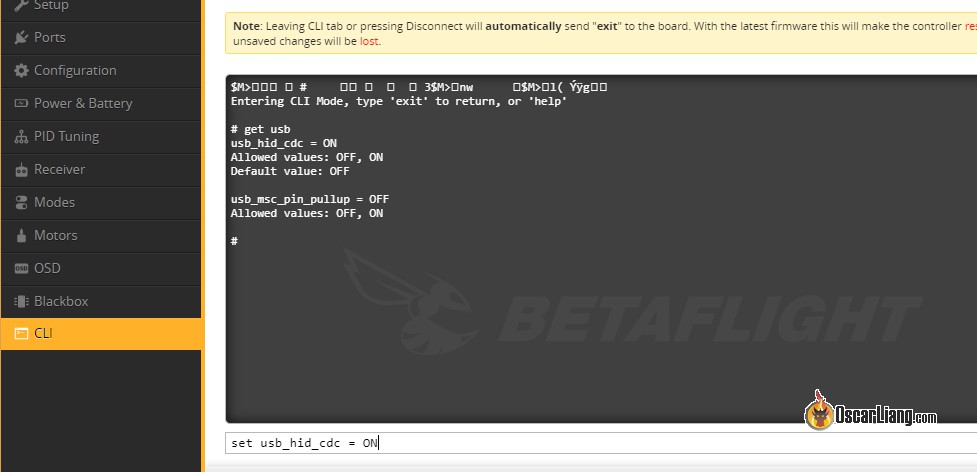
Включаем USB_HID_CDC в консоли Betaflight
После того как убедитесь, что приемник работает (см вкладку «Receiver», значения в каналах должны меняться при движении стиков), переходите в консоль (CLI) и вводите:
set usb_hid_cdc = on save
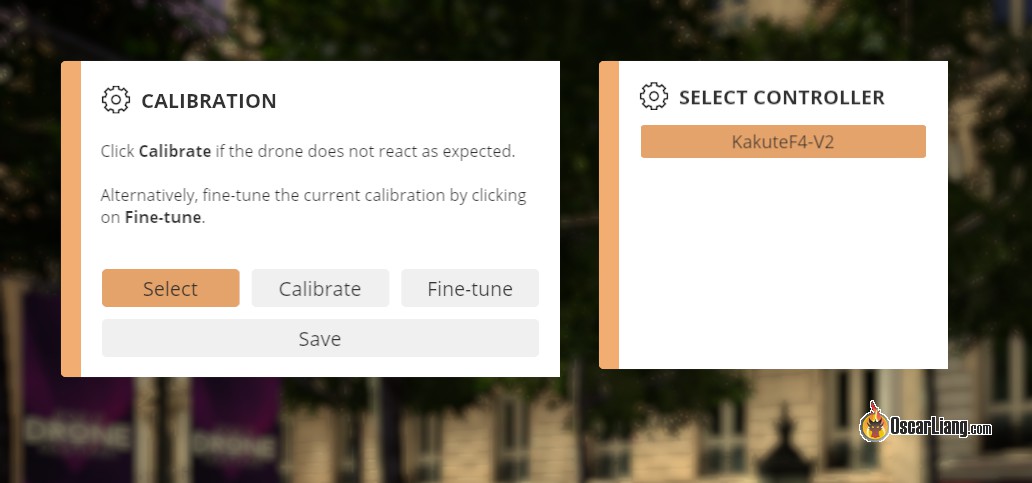
Выбираем джойстик в симуляторе
Как только вы закончите настройки, полетный контроллер определиться как джойстик и его можно будет выбрать в симуляторе. В первый раз нужно будет пройти процедуру калибровки стиков.
Отключаем перед реальными полетами
Если все эти настройки вы делали на коптере, то перед полетами лучше выключить USB_HID_CDC:
set usb_hid_cdc = off save
Есть ли какая-то задержка или проблемы?
Мне кажется, что задержка такая же, как при подключении Тараниса по USB. Я на самом деле не чувствую разницы. Но иногда были проблемы — отключения, примерно каждые 10 минут. Не страшно, тем более, что все само восстанавливается через секунду.
ВНИМАНИЕ! Прим. перев: если после включения джойстика, под Windows 7 не получается подключиться в betaflight configurator, тогда установите эти драйвера. Решение нашел в Betaflight Wiki.
Отключать Обязательно ?
Не обязательно.
возможно ли подключить контроллер от Dji GL300c пулть управления на сумуляторе DCL the GAME и,т,д
Можно полетать в бесплатном симуляторе от DJI. На счет совместимости с другими — не уверен.
Приветствую! А как обратно переключить контроллер? Он после всех этих действий не подключается к Betaflight 🙁 Определяется как другое устройство и всё(
А как обратно подключить контроллер к Betaflight? он перестал видеть его как com порт 🙁
Скорее всего у вас windows 7. Поставьте драйвера https://github.com/betaflight/betaflight/wiki/resources/hid_driver_windows_7.zip
Сейчас дополню статью.
Спасибо! Да, у меня windows 7.