Скоро у меня будет полетный контроллер Betaflight F7! Разработчики исправили кучу недочетов в плате Betaflight F4 и добавили новый функционал в новый ПК.
Оригинал: News: Betaflight F7 Flight Controller Released
Купить Betaflight F7 можно на сайте FPVModel.
Характеристики полетного контроллера Betaflight F7
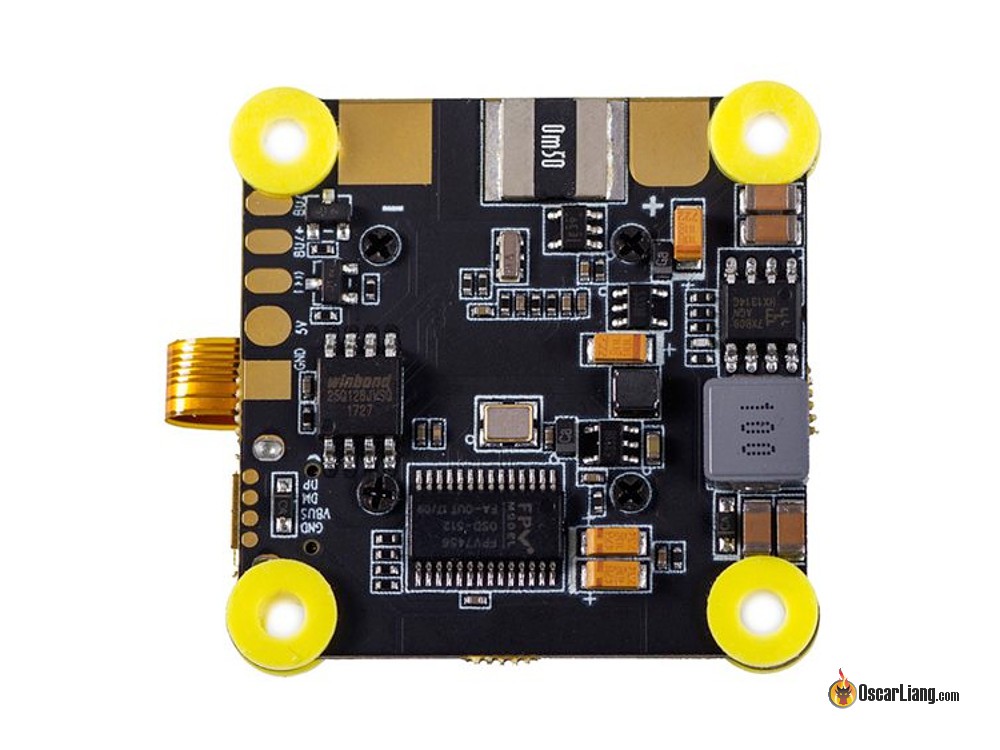
- Встроенная PDB
- Два гироскопа: MPU6000 и ICM20608
- Напряжение питания: 3S — 6S
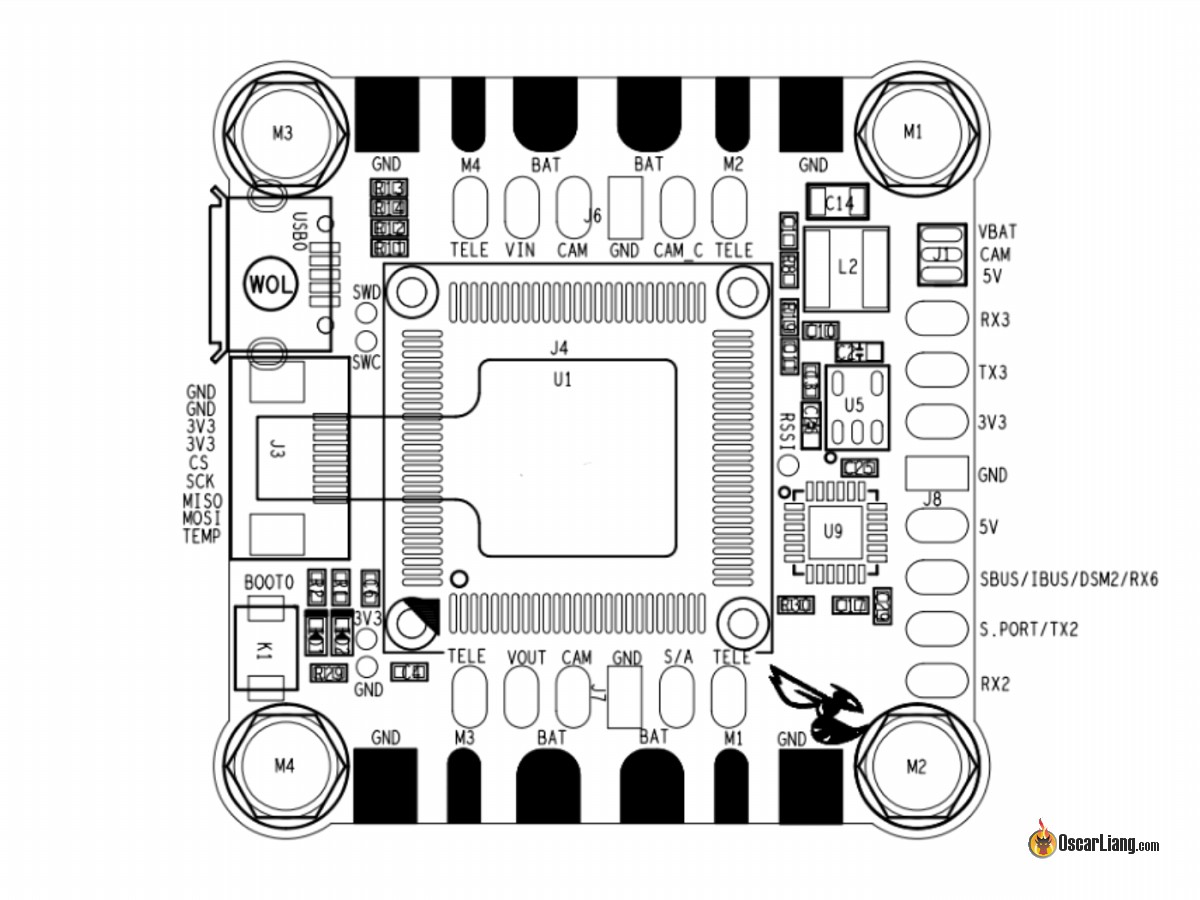
- 4 последовательных порта (у всех встроенные инверторы)
- BEC 5 В / 1 А
- Betaflight OSD
- Датчик тока (до 145 А)
- 16 МБ флэш-памяти для Blackbox
- Поддержка TBS Crossfire & Telemetry
- Поддержка Frsky SBUS & SmartPort без дополнительных инверторов
- Отдельный контакт для телеметрии регуляторов (ESC telemetry)
- Отдельный контакт для управления курсовой камерой (FPV Camera Control)
- Прошивка: Target BetaflightF7
Betaflight F7 VS Betaflight F4
Сравним полетные контроллеры Betaflight на F7 и на F4 в плане характеристик и сделанных улучшений.
Вот мой полный обзор Betaflight F4
| Betaflight F7 | Betaflight F4 | |
| Цена | $60 | $45 (распродажа по $34) |
| Процессор | F7 | F4 |
| Гироскоп | MPU6000+ICM20608 | MPU6000 |
| Контакты | контактные площадки | сквозные отверстия |
| Подключение ESC | Только сверху платы | с обеих сторон платы |
| BEC | 5V, 1.2A | 5V, 1.5A |
| UART (число послед. портов) | 4 | 3 |
Микроконтроллер F7 работает быстрее, чем F4, но в настоящее время дополнительная вычислительная мощь не играет большой роли, т.к. даже F4 загружен далеко не полностью. На мой взгляд, главное отличие — число последовательных портов, в Betaflight F7 на один больше, чем в F4, и не нужно беспокоиться об инверсии сигнала SBUS и SmartPort, т.к. в F7 все порты имеют аппаратный инверторы.
Расположение контактов на Betaflight F7 очень похоже на CLRacing F4, и это довольно удачное решение. Контакты имеют нормальный размер и к ним на самом деле легко паять провода. 🙂
И, наконец, я очень рад, что контакты для питания регулей перенесены наверх платы, на F3 и F4 было довольно сложно их припаивать, т.к. питание нужно было брать снизу платы, а сигнал сверху.
Что я думаю по поводу этой платы
На данный момент все сделанные улучшения выглядят просто замечательно.
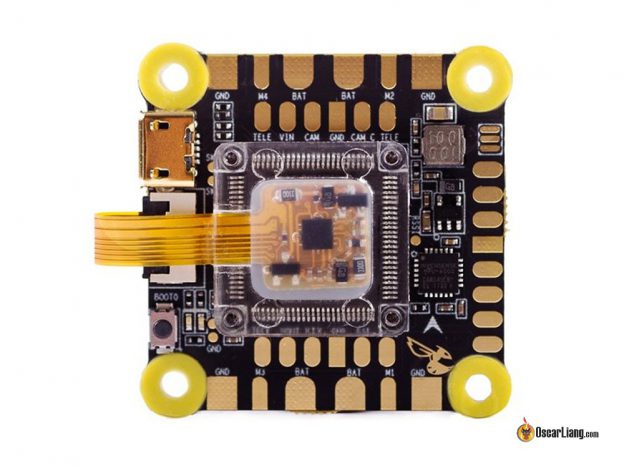
Самое интересное обновление — это использование двух гироскопов MPU6000 и ICM20608. Однако не думайте, что это стабилизация при помощи двух датчиков, одновременно они пока не работают.
Конечно, два датчика на одной плате увеличивают её стоимость, но и делают эту плату более перспективной в будущем. Сейчас большинство пилотов довольны используемой частотой 8k, для которой достаточно MPU6000. Но в будущем Betaflight сможет использовать все преимущества более быстрых гироскопов, например, будет использоваться фильтр Калмана.
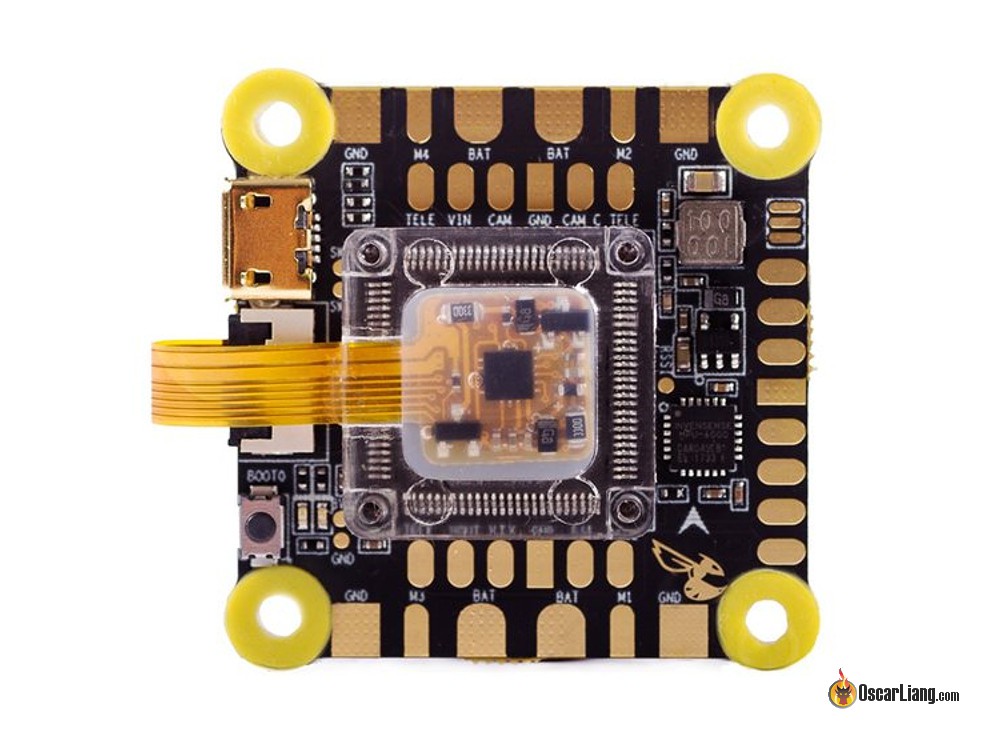
MPU6000 — хорошо известные гироскопы, стабильно работающие на частотах до 8k. ICM20608 можно использовать с частотой до 32к, но эти гироскопы очень чувствителен к шуму, думаю именно поэтому микросхема и смонтирована на антивибрационном подвесе, в пластиковом корпусе, примерно также, как и в Kakute F4 (MPU6000 располагается на основной плате, поэтому в комплекте идут резиновые шайбы).
При помощи консоли (CLI) вы можете выбрать нужный гироскоп.
Для использования MPU6000:
set gyro_to_use = 0 save
Для ICM20608:
set gyro_to_use = 1 save
Если вам не нравится ICM20806 или сама идея использования гибкого шлейфа для подключения гироскопа, тогда возможно вы захотите отпаять все это дело от основной платы и использовать только MPU6000? Я вижу, что на задней стороне платы есть винтики, так что, думаю, отсоединить будет довольно просто. Проверю это, как только получу ПК для тестирования.
Тестирование и обзор
Думаю, что получу эту плату через 1-2 недели, скоро будет больше информации о ней.