
Иногда я тороплюсь полетать на только что собранном коптере. К сожалению, бывало так, что некоторые коптеры даже не взлетали и всё из-за неправильной настройки. А из-за короткого замыкания и неисправных деталей несколько раз появлялся волшебный дым.
Оригинал: 15 Things You Must Do After Building a Mini Quad
Вся техника работает на волшебном дыму, когда он выходит, техника перестает работать (прим. перев).
Я учился на своих ошибках, и теперь хочу показать вам список вещей, которые я делаю после каждой сборки коптера. Надеюсь это руководство поможет вам избежать разных сюрпризов при первом включении коптера, и позволит лучше подготовить коптер к первому безопасному полету.
1. СНИМАЕМ ПРОПЕЛЛЕРЫ при любой работе с коптером!
Всегда снимайте пропеллеры при любой работе с коптером. Просто не ставьте их пока не будете готовы к полету.
Наши коптеры разработаны, так, что пока вы их не армите, винты не вращаются, но случаи разные бывают. Чтобы не пострадать самому и не повредить пропы/электронику, запомните: никаких пропов при ремонте/настройке!
2. Проверьте крепежные винты моторов
Первое, что я делаю после окончания сборки — проверяю длину болтиков, которые удерживают моторы, они не должны касаться обмоток. Иногда я делаю такую проверку сразу после установки моторов на раму.
Вот руководство как правильно проверять длину винтов.
Как вы знаете, рама для коптера обычно делается из карбона, а он проводит электричество. Если винтик будет касаться обмотки, то мы получим короткое замыкание, которое может сжечь мотор и вообще всё что подключено.
3. Используйте ограничитель тока, чтобы не спалить электронику!
Не знаю как сказать на сколько важен и полезен ограничитель тока (Smoke Stopper — останавливатель дыма, в англоязычной литературе) при тестировании коптера. Про него часто забывают, и не берут с собой. Не рискуйте и не ленитесь. Сердце просто разрывается на части, когда видишь дым из коптера, на который потрачены сотни баксов и куча времени на сборку!
Руководство, в котором показано как сделать ограничитель тока из лампочки (англ).

4. Проверяем правильность установки полетного контроллера
Подключаем коптер к Betaflight Configurator, переходим на вкладку Setup и видим 3Д модель. Начинаем вращать коптер в разные стороны, модель должна двигаться аналогично. Проверяем все оси: крен, тангаж, рысканье.
Совет: если модель вообще не двигается, тогда включите функцию Accelerometer на вкладке Configuration
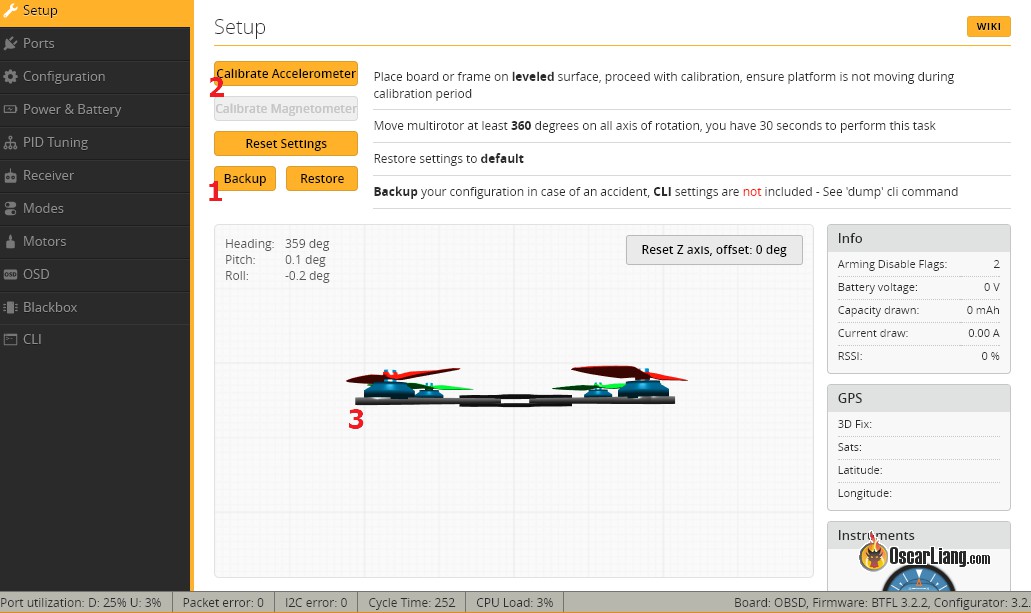
Если модель движется не так как коптер, то скорее всего полетный контроллер установлен не в том направлении. Исправить это легко, переходим на Configuration и меняем параметры в разделе «Board and Sensor Alignment» (обычно Yaw offset).
Если этот тест не пройден, т.е. полетный контроллер ориентирован неправильно, то коптер перевернется при попытке взлететь.
5. Тестируем моторы
Сейчас нужно проверить 3 вещи:
- все ли моторы работают?
- в правильном ли порядке подключены моторы?
- моторы вращаются в нужном направлении?
Подключите аккумулятор к коптеру, перейдите на вкладку Motors в Betaflight Configurator’е и поставьте галку «I understand…» («Я понимаю что рискую, пропеллеры сняты, хочу протестировать моторы»). По одному двигайте слайдеры вверх на несколько секунд чтобы раскрутить соответствующие им моторы. Нет смысла сильно газовать, без пропеллера это не очень хорошо.
Если один или несколько моторов дёргаются или вообще не реагируют, то нужно проверить пайку и провода между моторами (англ.) и регуляторами, а также между регуляторами и полетным контроллером.
Тут же убедитесь, что моторы подключены в нужном порядке. Если нет, тогда поменяйте местами провода с сигналом от ПК к ESC. Однако можно поступить иначе и переназначить выводы на моторы через Resource Remapping.
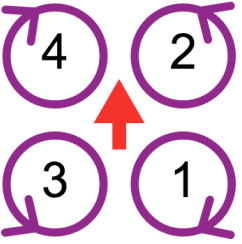
После того, как разобрались с порядком подключения моторов, убедитесь, что они вращаются в нужную сторону (как показано на картинке выше). Можно одеть пропы на моторы, но не фиксировать их гайкой.
Если вы всё это не проделаете, и что-то будет неправильно, то при попытке взлететь коптер перевернётся.
6. Калибровка регуляторов скорости
Если вы используете протокол DShot (DShot150, DShot300, DShot600, DShot1200 and DShot2400), тогда калибровать НЕ НУЖНО.
Однако, калибровка требуется при использовании протоколов PWM, Oneshot125, Oneshot42 и Multishot.
7. Проверяем приёмник
В Betaflight Configurator переходим на вкладку Receiver. Нужно убедиться, что каналы правильно реагируют на соответствующие стики и тумблеры.
- Если никаких движений и изменений нет, тогда проверьте питание приёмника и аппаратуры управления; убедитесь, что приёмник забинден с передатчиком
- Правильно ли приемник настроен в Betaflight? Вот руководство по настройке SBUS
Если полоски двигаются, но не в том порядке, тогда поменяйте «Channel Map» (AETR1234 или TEAR1234).
Совет: большинство полетных контроллеров не подают питание на приёмник, если подключены к компьютеру по USB, так что возможно потребуется подключить LiPo аккумулятор к коптеру.
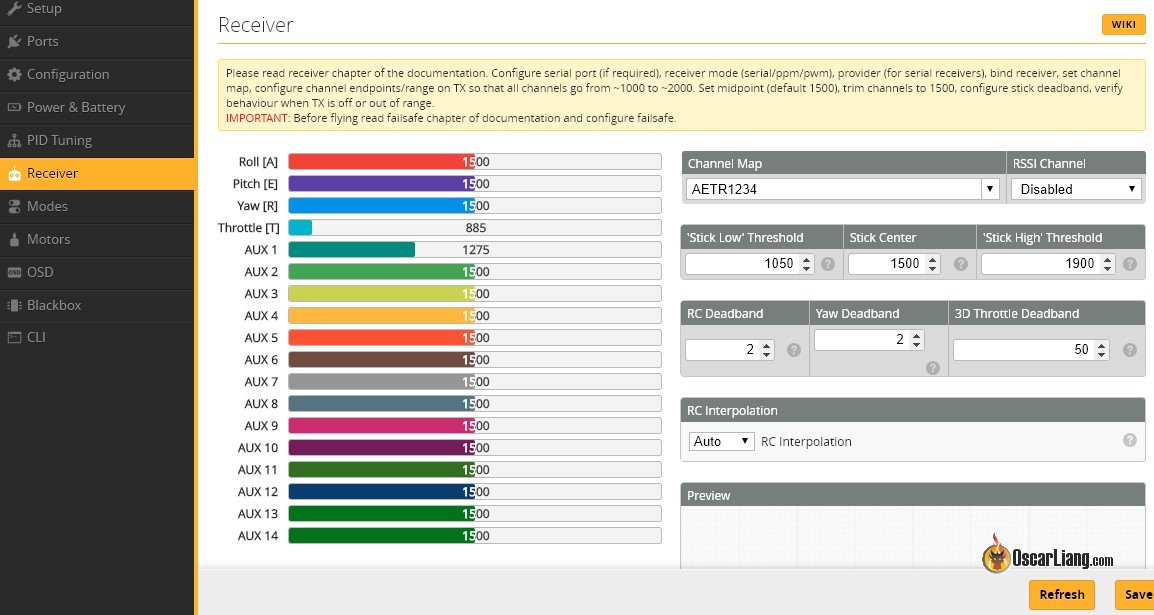
Следующий шаг: удостовериться, что средняя точка (mid-point) имеет значение 1500, а конечные точки (end-points) — 1000 и 2000. Это избавит вас от дрифта коптера и позволит использовать полный диапазон движений стиков. Вот руководство как настроить среднюю и конечные точки.
Ничего страшного, если значения для центральной точки прыгают вверх-вниз на несколько значений около 1500. Конечно это может вызвать небольшой дрифт, но, чтобы избавиться от него, просто увеличьте значение «deadband» (мертвая зона) в консоли; например, если вы видите значения в диапазоне 1495-1505, тогда deadband будет 4 или 5.
И наконец, убедитесь, что при нижнем положении стика газа значение в канале throttle меньше 1050 (в идеале, даже меньше 1000). Если это не так, тогда могут быть проблемы с армингом коптера.
8. Арминг коптера и газ
Попробуйте заармить коптер с пульта управления и чуток раскрутите моторы, дав небольшой газ (конечно без пропеллеров!).
Послушайте звук, не должно быть дёрганий и всяких странных вибраций даже на максимальном газу. Если коптер ведет себя странно, значит шум очень высок. Обычно это механический шум, вибрации, их легко устранить или как минимум снизить:
- используйте антивибрационное крепление полетного контроллера
- при использовании частот 32k/32k попробуйте их уменьшить до 8k/8k. В режиме 32k гироскопы очень чувствительны
- подстройте фильтры Betaflight (англ.), например, уменьшите частоту фильтра низких частот (gyro low pass filter frequency)
Если это не помогло, то придется разбираться детальнее.
Есть проблемы с армингом коптера? Давайте разбираться (англ).
9. Настраиваем Failsafe
Невозможно описать важность настройки failsafe. По-моему, это одна из тех вещей, о которых новичок должен узнать в первую очередь.
Без настройки failsafe, при потере сигнала, ваш дрон просто будет лететь в неизвестном направлении, пока не сядет батарейка, или пока он куда-нибудь не врежется. Представьте какие повреждения он может нанести.
Вот руководство по настройке Failsafe (англ).
10. Настраиваем Betaflight
Первоначальная настройка Betaflight может быть пугающей, там очень много параметров!
Не волнуйтесь, вот руководство по настройке Betaflight перед первым полетом, предназначенное для новичков. Всего несколько простых шагов будет достаточно для подготовки к первому полету. Все прочий вещи, можно изучить потом, как будет время 🙂 в этом же руководстве есть ссылки на описание разных продвинутых функций.
11. Проверьте FPV оборудование
Перед первым полетом на коптере, убедитесь, что FPV оборудование работает нормально: видеопередатчик и приемник настроены на один канал, в очках/шлеме есть картинка. Вот статья про основы FPV полетов (англ).
Если вы используете OSD, тогда вам стоит почитать про настройку Betaflight OSD.
12. Не включайте видеопередатчик без антенны
Видеопередатчик может очень сильно греться, без антенны он будет греться ещё сильнее, поэтому он за минуту или даже за несколько секунд сгорит. Перед включением видеопередатчика ещё раз убедитесь, что к нему подсоединена антенна.Помимо этого я не советую надолго включать видеопередатчик при настройке коптера, т.к. только в полете охлаждение будет нормальным.
Если видеопередатчик перегревается, то вот вам несколько советов (англ).

13. Проверьте правильность установки пропеллеров
Пропы тоже бывают двух видов: правого (CW) и левого (CCW) вращения. Если вы поставить не тот винт (что я периодически и делаю, несмотря на многолетний опыт), то при попытке взлететь коптер перевернется.
Вот как они должны быть установлены.

14. Поставьте пищалку
Не только для того, чтобы получать предупреждение о низком заряде аккумулятора, но и для того, чтобы проще было найти коптер в высокой траве. Дополнительно, вы можете настроить Motor Beacon — пищание моторами (требуется DShot).
15. Практикуйтесь в симуляторе
Поставьте FPV симулятор и практикуйтесь как можно больше!
Поверьте мне, это очень сильно поможет! Я сам видел, как новичок в первый же день освоил акро режим и сделал мертвую петлю уже через 20 минут полетов.
Тяжело признаться, но когда я начал летать на коптерах в 2013 году, симуляторов не было и мне потребовалось 6 месяцев, чтобы выполнить мой первый ролл…

Заключение
Итак, всё работает? Похоже, что вы готовы к первому полету, поздравляю! Теперь вы, наверное, заходите узнать больше про тонкую настройку коптера (англ.) 🙂
Есть вопросы? Если не нашли ответов в гугле, тогда пишите на форуме IntoFPV (англ), я и сотни других пилотов поможем вам!
Я что-то пропустил? Что ещё новички должны делать перед первым полетом? Дайте знать в комментариях.
История изменений
- Июнь 2018 — первая версия статьи с 11 пунктами
- Июль 2018 — добавлено 4 пункта
Никогда. НИКОГДА! Никогда не надо пытаться сразу же после настройки взлетать дома. Даже если на 100% уверен что всё правильно настроил